0 ę²čį
ĪĪĪĪöĄ┐žĪĪĪĪöĄ┐žŽĄĮyĄ─ķ_Ę┼ąį╩Ū─┐Ū░öĄ┐ž╝╝ąg蹊┐Ą─¤ß³cĪŻ¼FļAČ╬Ż¼öĄ┐žŽĄĮyĄ─šµš²ķ_Ę┼ąį▀Ć║▄ļyū÷ĄĮŻ¼ę╗ą®öĄ┐žŽĄĮyų╗╩ŪŠ▀éõ┴╦ķ_Ę┼╩ĮŽĄĮyĄ─╠ž³c╗“š▀ķ_Ę┼│╠Č╚ŽÓī”┤¾ę╗ą®Č°ęčĪŻ─┐Ū░Ą─蹊┐┤¾Č╝ų°č█ė┌╗∙ė┌PC ŲĮ┼_Ą─▄øė▓╝■ķ_░lŻ¼ŲõīŹ┘|Š═╩Ūį┌PC ŲĮ┼_Ą─╗∙ĄA╔ŽŻ¼┼õęįę╗Č©Ą─Įė┐┌┐©╝░╚╦ÖCĮ╗╗źĮń├µ▀MąąöĄ┐ž╝ė╣żĄ─īŻķT╣żŠ▀Ż¼į┌ĮYśŗ║═ąį─▄╔ŽČ╝┤µį┌║▄┤¾ŠųŽ▐ąįĪŻė╔ė┌ŪČ╚ļ╩ĮöĄūųą┼╠¢╠Ä└ĒŲ„Š▀ėąĖ▀╦┘▀\╦Ń─▄┴”Ż¼╩╣įSČÓÅ═ļsĄ─┐žųŲ╦ŃĘ©║═╣”─▄Ą├ęįīŹ¼FŻ╗╝ėų«Ųõ░čīŹĢr╠Ä└Ē─▄┴”║═┐žųŲĄ─═ŌįO╣”─▄╝»ė┌ę╗╔ĒĄ╚ā׳cŻ¼╦∙ęį╦³į┌öĄ┐ž╝╝ągųąįĮüĒįĮ▒╗ÅVĘ║æ¬ė├ĪŻ▒Š╬─╠ß│÷┴╦╗∙ė┌T I ╣½╦ŠŪČ╚ļ╩ĮöĄūųą┼╠¢╠Ä└ĒŲ„
ĪĪĪĪTMS320F2812 Ą─öĄ┐žŽĄĮyŻ¼┤╦┐žųŲŽĄĮy─▄ē“¬Ü┴ó═Ļ│╔╦┼Ę■ļŖÖCĄ─īŹĢr▀\äė┐žųŲ,┴Ē═Ō└¹ė├DSP ā╚▓┐Ą─CAN┐éŠĆ┐žųŲŲ„Ż¼īŹ¼F┴╦öĄ┐žįOéõÖz£yŽĄĮyĄ─ŠWĮj╗»Ż¼śŗ│╔┴╦Ęų▓╝╩Į£y┐žŠWĮjĪŻ×ķÅøčaå╬╚╬䚎ĄĮyĄ─▄ø╝■įOėŗĄ─▓╗ūŃ,▒ŠŽĄĮyęŲų▓┴╦ŪČ╚ļ╩ĮīŹĢrā╚║╦mC/OS-II,×ķ╔ŽīėĄ─▄ø╝■ķ_░lĮ©┴ó┴╦┴╝║├Ą─╚╬äš╣▄└ĒŲĮ┼_║═Ąūīė“īäėŲĮ┼_ĪŻ
1 ŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─ė▓╝■śŗ│╔
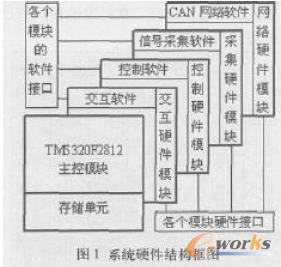
ĪĪĪĪ▒ŠŽĄĮy▓╔ė├─ŻēK╗»Ą─įOėŗĘĮĘ©Ż¼Č©┴x┴╦ŽĄĮyĄ─┐éŠĆŻ¼ŅA┴¶┴╦ś╦£╩Ą─╣żśI╝ēĮė┐┌Ż¼ė├æ¶┐╔Ė∙ō■▓╗═¼╣”─▄ę¬Ū¾▀xō±─ŻēKęįųžśŗūį╝║Ą─ŽĄĮyĪŻ▀@śėĄ─įOėŗ×ķīŹ¼FöĄ┐žŽĄĮyĄ─ķ_Ę┼ąįę¬Ū¾ū÷┴╦┴╝║├Ą─ė▓╝■╗∙ĄAĪŻŽĄĮyė▓╝■ĮYśŗ┐“łD╚ńłD1 ╦∙╩ŠĪŻ
ĪĪĪĪ1.1 ų„┐ž╝░Į╗╗ź─ŻēK
ĪĪĪĪų„┐ž╝░Į╗╗ź─ŻēKų„ę¬ė╔T I ╣½╦ŠĄ─T M S 3 2 0F2812 DSP ╝░ŽÓæ¬Ą─┤µā”å╬į¬Īó’@╩ŠĪóµI▒PĪó═Ōć·“īäėĄ╚ļŖ┬ĘĮM│╔Ż¼╩ŪįōŽĄĮyĄ─ė▓╝■╗∙ĄAĪŻ
ĪĪĪĪ1.2 ┐žųŲļŖ┬Ę
ĪĪĪĪ▒ŠöĄ┐žŽĄĮy▓╔ė├╚½öĄūų╩ĮĮ╗┴„╦┼Ę■ļŖÖCŻ¼Ųõ┐žųŲė╔Č©ųŲĄ─▀\äė┐žųŲ─ŻēK═Ļ│╔ĪŻ£╩┤_┐╔┐┐Ą─╬╗ų├║═╦┘Č╚Öz£yŁh╣Ø╩ŪöĄ┐žŽĄĮyĖ▀╦┘Ė▀Š½Č╚Ą─╗∙ĄAĪŻ×ķ┤╦Ż¼╬ęéā▓╔ė├ę╗Ų¼CPLD üĒīŹ¼F4 ▒ČŅlėŗöĄļŖ┬ĘŻ¼ė╔ė┌į┌CPLD ā╚Ą─ķTļŖ┬Ę║═ė|░lŲ„Ą─╠žąį═Ļ╚½ę╗ų┬Ż¼╦∙ęįį┌ŽÓ═¼▐D╦┘Ž┬Ė„ļŖÖC▌S▒ČŅlą┼╠¢Ą─├}ø_ų▄Ų┌┐╔ęį▒Ż│ųę╗ų┬ĪŻ×ķęųųŲķLŠÓļxé„▌öųą┐╔─▄ę²╚ļĄ─Ė╔ö_ą┼╠¢Ż¼▌ö│÷ų┴“īäėŲ„Ą─├}ø_ą┼╠¢║═▌ö╚ļų┴CPLD Ą─ŠÄ┤aŲ„Ę┤üą┼╠¢▓╔ė├▓ŅĘų▌ö│÷ĘĮ╩ĮĪŻįōĘĮ░Ė┐╔Ė─╔Ųš¹éĆļŖ┬ĘĄ─▀ē▌ŗ║═ļŖÜŌ╠žąįŻ¼į÷ÅŖļŖ┬ĘĄ─┐╣Ė╔ö_ąį─▄Ż¼Å─Č°╠ßĖ▀š¹éĆöĄ┐žŽĄĮyĄ─╝ė╣żŠ½Č╚║═╣żū„Ą─┐╔┐┐ąįĪŻ
łD1 ŽĄĮyė▓╝■ĮYśŗ┐“łD
ĪĪĪĪ1.3 ą┼╠¢▓╔╝»─ŻēK
ĪĪĪĪöĄō■▓╔╝»─ŻēKīŹĢrĄž▒O£yöĄ┐ž╝ė╣ż▀^│╠Ż¼┐╔▓╔╝»«öŪ░Ė„éĆ┐žųŲ▌Sū°ś╦╬╗ų├Īó▀\äė╦┘Č╚Īó╝ė╦┘Č╚Īó╝ė╣ż│╠ą“ųĖßśĪóŽĄĮyį÷ęµĪóĄČŠ▀ģóöĄĄ╚öĄō■Ż¼▒ŻūCŽĄĮyĄ─┐╔┐┐▀\ąąŻ¼ī”öĄ┐žŽĄĮy▀MąąīŹĢr▒O£y╝░į\öÓĪŻįō─ŻēKų„ę¬ė╔TMS320F2812 Ų¼ā╚Ą─ADC ║══Ōć·Ą─ą┼╠¢š{└ĒļŖ┬ĘĮM│╔ĪŻ
ĪĪĪĪ1.4 ŠWĮj═©ėŹ─ŻēK
ĪĪĪĪCANŻ©Controller Area NetworkŻ®┐éŠĆŻ¼ī┘ė┌¼Fł÷┐éŠĆ╝╝ągĘČ«ĀŻ¼╩Ūę╗ĘNėąą¦ų¦│ųĘų▓╝╩Į┐žųŲ╗“īŹĢr┐žųŲĄ─┤«ąą═©ą┼Šųė“ŠWĮjŻ¼ęį░ļļp╣żĄ─ĘĮ╩Į╣żū„Ż¼▓╔ė├╗∙ė┌öĄō■Ą─é„▌öĘĮ╩ĮŻ¼Ž¹Žó┐╔ęįį┌╚╬║╬Ģr┐╠ė╔╚╬║╬╣سc░l╦═ĄĮ┐éŠĆ╔ŽŻ¼▓ó▒╗Ųõ╦¹╦∙ėą╣سcĮė╩▄Īó┼ąöÓ║¾øQČ©╩Ūʱæ¬ė├▀@éĆŽ¹ŽóĪŻė╔ė┌ŲõŠ▀ėą═©ą┼╦┘┬╩Ė▀Īóķ_Ę┼ąį║├ĪóīŹĢrąį║├Īó╝mÕe─▄┴”ÅŖęį╝░┐žųŲ║åå╬Īóé„▌ö┐╔┐┐ąįĖ▀ĪóöUš╣─▄┴”ÅŖĪóŽĄĮy│╔▒ŠĄ═Ą╚╠ž³cŻ¼ęčÅVĘ║æ¬ė├ė┌┐žųŲŽĄĮyųąĄ─Ė„Öz£y║═ł╠ąąÖCśŗų«ķgĄ─öĄō■═©ą┼Ż¼╩Ū«öĮ±ūįäė╗»ŅIė“ųą╣½šJ×ķūŅŠ▀ėąæ¬ė├Ū░Š░Ą─╝╝ągų«ę╗ĪŻ
ĪĪĪĪCAN┐éŠĆŽĄĮyĄ─ė▓╝■ļŖ┬Ęų„ę¬ė╔T M S 3 2 0 -F2812ĪóCAN ┐éŠĆ╩š░lŲ„PCA82C250 Ą╚ąŠŲ¼ĮM│╔ĪŻTMS320F2812 ųąĄ─CAN ėą32 éĆÓ]ŽõŻ¼š╝ė├512 ūų╣ØRAMŻ¼▓óŪę╦∙ėąÓ]ŽõČ╝Š▀ėą¬Ü┴óĄ─Įė╩šŲ┴▒╬╝─┤µŲ„Ż¼Č╝┐╔ęį┼õų├×ķ░l╦═╗“Įė╩šÓ]ŽõŻ¼ŪęČ╝ėąę╗éĆ┐╔ŠÄ│╠Ą─Įė╩šŲ┴▒╬╝─┤µŲ„ĪŻ╦∙ėą▀MąąöĄō■é„▌ö║═Įė╩š×V▓©Ą─ģfūh╣”─▄Č╝╩Ūė╔CAN ┐žųŲŲ„ł╠ąąĄ─Ż¼═©▀^DSP Ų¼ā╚Ą─╠ž╩Ō╣”─▄╝─┤µŲ„┐╔┼õų├CAN ┐žųŲŲ„įLå¢Įė╩šĄĮĄ─öĄō■ęį╝░é„▌ööĄō■ĪŻę“┤╦Ż¼TMS320F2812┐╔═Ļ│╔CAN ┐éŠĆģfūhĄ─öĄō■µ£┬Ęīė║═æ¬ė├īėĄ─╦∙ėą╣”─▄ĪŻ
┴Ē═ŌŻ¼TMS320F2812 Ų¼ā╚ėą╝»│╔Ą─SCIĮė┐┌,╬ęéā═©▀^DSP Ą─SCI īŹ¼F┴╦┼cPC ÖCĄ─RS-232 ═©ėŹŻ¼┐╔▀Mąą╔ŽŽ┬╬╗ÖCĄ─öĄō■Į╗ōQĪŻ
2 ŠWĮj▒O£yĄ─īė┤╬╗»╝ż╗ŅÖCųŲ
ĪĪĪĪ×ķ┴╦▒ŻūCöĄ┐žįOéõ¼Fł÷▀\ąąĄ─░▓╚½┐╔┐┐║═«aŲĘĄ─╝ė╣ż┘|┴┐Ż¼╝ė╣ż▄ćķg▓╔ė├é„ĖąŲ„ī”ÖC┤▓▀\ąąĀŅæBŻ¼╚ńš±äėą┼╠¢ĪóĄČŠ▀─źōpĪó▌S│ą£žČ╚ĪóįOéõš±äė┴┐║═ŪąŽ„┴”Ą╚─ŻöM┴┐▀MąąīŹĢröĄō■▓╔╝»Ż¼▓ó▀Mąąį┌ŠĆĘų╬÷Ż¼╝░Ģrš{š¹ÖC┤▓▀\ąąģóöĄĪŻ«ö¼Fł÷Śl╝■ę¬Ū¾ć└Ė±Ż¼ąĶꬥ─é„ĖąŲ„ŠWĮj▒╚▌^²ŗ┤¾Ż¼ŽÓī”Ą─öĄō■▓╔╝»║═Ęų╬÷ėŗ╦Ń┴┐║▄┤¾ĢrŻ¼å╬¬Üę╗┼_öĄ┐žįOéõŠ═┐╔─▄¤oĘ©╝░ĢrĄ─╠Ä└Ē¼Fł÷Ą─öĄō■ĪŻ╠žäe╩ŪąĶę¬▀Mąą╣╩šŽį\öÓ║═ĘĄ╗ž┐žųŲĄ─ł÷║ŽŻ¼«ö╔µ╝░Ą─Ūķør▒╚▌^Å═ļsŻ¼Ģ■Įø│Ż░l╔·│¼│÷å╬¬ÜįOéõ╠Ä└Ē─▄┴”║═┤µā”─▄┴”Ą─ŪķørŻ¼▀@Ģrėą▒žę¬ĮMĮ©öĄ┐žįOéõĄ─╝ė╣ż═©ėŹŠW┬ĘŻ¼└¹ė├Ęų▓╝╩Įėŗ╦ŃĄ─╦╝ŽļŻ¼īó¼Fł÷öĄō■Ą─▓╔╝»╠Ä└Ēį\öÓĘĄ╗ž┐žųŲĘų╔óĄ─Ųõ╦¹Ą─įOéõųą╚źĪŻ
ĪĪĪĪTMS320F2812 ā╚▓┐ūįĦ┴╦ę╗éĆCAN ┐éŠĆ┐žųŲŲ„ĪŻCAN ┐éŠĆ─▄ē“į┌╣żÅSśŗ│╔Ą═īėĄ─Ęų▓╝╩ĮöĄō■▓╔╝»ŽĄĮyŻ¼─▄ē“ū÷ĄĮöĄ┐žįOéõÖz£yŽĄĮyĄ─ŠWĮj╗»Ż¼ļSĢr╠ß╣®╔ŽīėöĄō■½@╚ĪĄ─ąĶ꬯¼ę“┤╦Ż¼┐╔ęį│õĘų└¹ė├DSP ā╚▓┐Ą─CAN ┐éŠĆ┐žųŲŲ„Ż¼śŗ│╔Ęų▓╝╩Į£y┐žŠWĮjĪŻ╬ęéā╦∙Į©┴óĄ─ŠWĮjśŗ╝▄╩Ūę╗ĘNīė┤╬╗»Ą─ĮYśŗ╚ńłD2 ╦∙╩ŠŻ¼īó═©ėŹŠWĮj╗»╠Ä└Ē─▄┴”║═┐žųŲ─▄┴”äØĘų×ķ╚║┐žįOéõ╝ēĪó▄ćķg╝ēĪóŲ¾śI╝ēų▒ĄĮ╗ź┬ōŠW╝ēĪŻå╬¬ÜĄ─įOéõ▒╗ųīėĄ─┬ōŽĄŲüĒŻ¼Ųõ▒O┐ž▀ē▌ŗų╗žōž¤▒ŠÖCĄ─ę╗ą®│ŻęŖĄ─╣╩šŽį\öÓŪķørŻ¼▄øė▓╝■ĮYśŗ┐╔ęįėą║▄┤¾║å╗»Ż¼į┌▀@ę╗╝ēŻ¼╬ęéāė├CAN ┐éŠĆ░čöĄ┐žŽĄĮyĄ─Ė„╣”─▄─ŻēK┬ōĮėŲüĒĪŻ╔Žę╗īė┤╬Ą─ŠWĮj╣سcįOéõŻ¼ätŠ▀ėąĖ³ÅŖĄ─╠Ä└Ē─▄┴”║═╣╩šŽĘų╬÷─▄┴”Ż¼─▄ē“Įė╩▄Ž┬īė¤oĘ©╠Ä└ĒĄ─öĄō■╗“│§▓Į▀\╦ŃĮYśŗŻ¼▀Mąąį┘╝ė╣żŻ¼═Ļ│╔¼Fł÷Ą─Ęų╬÷į\öÓę¬Ū¾ĪŻļSų°īė┤╬Ą─▓╗öÓ╠ßĖ▀Ż¼į\öÓ╦«ŲĮę▓▓╗öÓį÷ÅŖŻ¼Ą½╦∙║─┘MĄ─ŠWĮj┘Yį┤ę▓Š═įĮ┤¾Ż¼×ķā×╗»ŠWĮj╠Ä└Ē┘Yį┤Ż¼╬ęéā╠ß│÷┴╦ĀŅæB▒O┐žĄ─Ęųīė╝ż╗ŅÖCųŲĪŻŲõ║╦ą─įŁät╩ŪŻ¼▓╔ė├ę╗ĘN┐╔ė╔ė├æ¶Č©ųŲĄ─¼Fł÷▒O┐ž▓▀┬įŻ¼Ž╚Ų┌Č©┴xę╗ą®┐╔─▄Ą─¼Fł÷į\öÓą╬╩Į║═╦∙ąĶĄ─▒O┐ž╠Ä└ĒÅŖČ╚Ż¼«ö¼Fł÷▒O£yąĶę¬į\öÓ╠Ä└Ē─ŻēKŽÓæ¬ĢrŻ¼Ė∙ō■Č©┴x▓▀┬įŻ¼╝ż╗ŅŽÓæ¬Ą─╠Ä└ĒÖCųŲŻ¼┐╔ęį▓╔ė├ųīėŽ“╔Ž╝ż╗ŅĄ─ĘĮ╩ĮŻ¼ę▓┐╔ęįų▒Įė╝ż╗ŅųĖČ©Ą─╠Ä└ĒīėŻ¼▓óŪęĮ©┴óŲę╗ĘNŽĄĮyĄ─ūįīW┴ĢÖCųŲŻ¼ėøæø║═ÜwŅÉĮø│Ż│÷¼FĄ─▒O£yĀŅæBŻ¼╠ßĖ▀ĀŅæB▒O£yĄ─ŲĮŠ∙ą¦┬╩ĪŻ
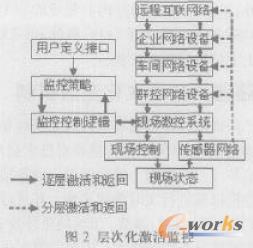
łD2 īė┤╬╗»╝ż╗Ņ▒O┐ž
3 ╗∙ė┌mC/OS-IIĄ─ŽĄĮy▄ø╝■įOėŗ
ĪĪĪĪå╬╚╬äšöĄ┐žŽĄĮyĄ─▄ø╝■įOėŗĮYśŗ═©│Ż═©▀^ę╗éƤoŽ▐裣hüĒ┼ąöÓ╚╬䚥─ś╦ųŠ┴┐Ż¼═©▀^ųąöÓŻ©Č©ĢrųąöÓ║═µI▒PųąöÓŻ®üĒ╝ż╗Ņą┬Ą─╚╬䚯¼▀M╚ļ╣╠Č©Ą─╚╬äšųąöÓ│╠ą“╚ļ┐┌Ż¼üĒīŹ¼F╚╬䚥─š{Č╚ĪŻį┌▀@ĘNš{Č╚ĘĮ╩ĮŽ┬Ż¼ŽĄĮyĄ─┤¾ČÓöĄĢrķg▒╗╚╬䚥╚┤²Ą─¤oŽ▐裣hš╝ō■Ż¼į┌╚╬äš╠Ä└ĒĄ─▀^│╠ųąŻ¼Ųõ╦¹Ą─═¼Ą╚╝ēĄ─╚╬䚤oĘ©╩╣ė├CPU Ą─┘Yį┤Ż¼¤oĘ©▀Mąą╚╬äšų«ķgėąą¦Ą─╔ŽŽ┬╬─ŪąōQŻ¼ī¦ų┬┴╦ŽĄĮyĄ─īŹĢrąį╩«Ęų▓╗┐╔┐┐ĪŻ═¼ĢrŻ¼╚ń╣¹╚╬äšį┌ł╠ąą▀^│╠ųąąĶꬥ╚┤²ą┼╠¢Ż¼╗“čėĢrą┼╠¢╠Ä└ĒŻ¼«ö▀@ĘNčėĢr▓╗┐╔ŅAėŗĄ─ŪķørŽ┬Ż¼Š═┐╔─▄š╝ō■┤¾┴┐Ą─ŽĄĮyĢrķgŻ¼įņ│╔ŽĄĮy┘Yį┤Ą─┤¾┴┐└╦┘MŻ¼ī¦ų┬¤oĘ©Ēææ¬Ė³Šo╝▒Ą─╚╬䚯¼▀@ĘN¤oŽ▐Ą─Ą╚┤²ŪķørĢ■ī¦ų┬įSČÓ▓╗┐╔ŅAėŗĄ─║¾╣¹ĪŻį┌DSPŽĄĮyųąŪČ╚ļmC/OS-IIīóį÷ÅŖŽĄĮyĄ─┐╔┐┐ąįŻ¼▓ó╩╣Ą├š{įć│╠ą“ūāĄ├║åå╬ĪŻį┌ŽĄĮyųąŪČ╚ļmC/OS-IIŻ¼┐╔ęį░čš¹éĆ│╠ą“Ęų│╔įSČÓ╚╬䚯¼├┐éĆ╚╬䚎Óī”¬Ü┴óŻ¼╚╗║¾į┌├┐éĆ╚╬äšųąįOų├│¼Ģr║»öĄŻ¼Ģrķgė├═Ļęį║¾Ż¼╚╬äš▒žĒÜĮ╗│÷CPU Ą─╩╣ė├ÖÓĪŻ╝┤╩╣ę╗éĆ╚╬äš░l╔·å¢Ņ}Ż¼ę▓▓╗Ģ■ė░ĒæŲõ╦¹╚╬䚥─▀\ąąĪŻmC/OS-II ā×įĮĄ─╝╝ągąį─▄Ż¼ėą└¹ė┌öĄ┐žŽĄĮyĄ─īŹĢrĒææ¬Ż¼─▄ē“┤┘▀MöĄ┐žŽĄĮyš¹¾wąį─▄Ą─╠ß╔²Ż¼╠ßĖ▀ŽĄĮyĄ─┐╔┐┐ąįŻ¼═¼Ģrę▓╩╣Ą├š{įć│╠ą“ūāĄ├╚▌ęūĪŻ
ĪĪĪĪ╚ńłD3╦∙╩ŠŻ¼ŽĄĮyį┌ęįμC/OS-II×ķĄūīė▄ø╝■ŲĮ┼_Ą─╗∙ĄA╔ŽŻ¼ė╔μ C/OS-II ╠ß╣®Ą─Ė„ĘN▄ø╝■ŲĮ┼_ų¦│ųŻ¼śŗĮ©ęį╚╬äš╣▄└ĒŻ¼═©ą┼╣▄└ĒŻ¼ųąöÓų┘▓├Ż¼Č茯╣▄└ĒŻ¼ā╚┤µ╣▄└ĒŻ¼ĢrńŖ╣▄└Ē║═ŠWĮjų¦│ųĄ─▄ø╝■┐“╝▄Ż¼═¼Ģrį┌μC/OS-IIĄ─╗∙ĄA╔ŽųŲČ©║Ž└Ēėąą¦Ą─ā׎╚╝ēŻ¼ęį▒ŻūCCNC ŽĄĮyĘĆČ©┐╔┐┐Ą─▀\ąąĪŻĖ∙ō■öĄ┐žŽĄĮy╝ė╣żĄ─╠ž³c┐╔īó╚╬äšäØĘų×ķ─ŻēKŻ║╬╗ų├┐žųŲ─ŻēKŻ¼▓Õča▀\╦Ń─ŻēKŻ¼äėæB▒O┐ž─ŻēKŻ¼ūg┤aĮŌßī─ŻēKŻ¼Į╗╗ź’@╩Š─ŻēKŻ¼µI▒P╚╬äš─ŻēKŻ¼╬─╝■ŽĄĮy╣▄└Ē─ŻēKŻ¼═©▀^Ė„─ŻēKų«ķgĄ─║Ž└ĒĮY║ŽŻ¼ą╬│╔ŽĄĮyĄ─╣żū„║═æ¬ė├ŲĮ┼_Ż¼╝»│╔▒Ńė┌ė├æ¶▀MąąČ■┤╬ķ_░lĄ─Įė┐┌│╠ą“Ż¼▒Ńė┌ŽĄĮyĄ─ŠSūo┼c╔²╝ēĪŻ
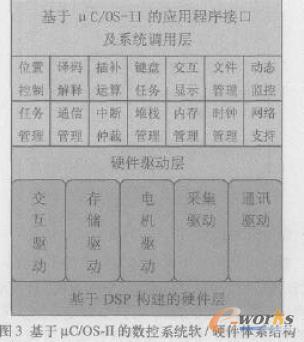
łD3 ╗∙ė┌mC/OS-IIĄ─öĄ┐žŽĄĮy▄ø/ė▓╝■¾wŽĄĮYśŗ
4 ĮY╩°šZ
ĪĪĪĪ╗∙ė┌CAN ┐éŠĆśŗĮ©Ą─īė┤╬╗»ŠWĮj▒O£y─ŻēKŻ¼▒ŻūC┴╦öĄ┐žįOéõ¼Fł÷▀\ąąĄ─░▓╚½┐╔┐┐║═«aŲĘĄ─╝ė╣ż┘|┴┐ĪŻDSP ║═CPLD Ą─æ¬ė├╩╣ŽĄĮy┐žųŲĮYśŗ┤¾×ķ║å╗»Ż¼ęūė┌īŹ¼FĖ„ĘN▌^Å═ļsĄ─▀\äė▄ē█E┐žųŲĪŻ═¼ĢrŻ¼╗∙ė┌īŹĢr▓┘ū„ŽĄĮyśŗĮ©Ą─▄ø╝■¾wŽĄŻ¼┐╦Ę■┴╦«öŪ░öĄ┐žŲĮ┼_Ą─╚▒Ž▌Ż¼īŹ¼F┴╦ŽĄĮyĄ─īŹĢrš{Č╚Ż¼╠ßĖ▀┴╦ŽĄĮyĄ─┐╔┐┐ąį║═Š½Č╚ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌ŠWĮj▒O£yĄ─ŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─蹊┐
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/support/11121513883.html