Ż▒ ę²čį
╣Ōé„▌ö╝╝ąg’w╦┘░lš╣║═║╦ą─┬Ęė╔▒Ē┐ņ╦┘į÷ķLī”┬Ęė╔Ų„ąį─▄╠ß│÷┴╦Ė³Ė▀Ą─ąĶŪ¾Ż¼╗ź┬ōŠW┐ņ╦┘░lš╣ę¬Ū¾┬Ęė╔Ų„ļSų°ŠWĮjęÄ─Ż║═┴„┴┐į÷ķL▓╗öÓöUš╣ūį╔Ēąį─▄Ż¼ļm╚╗═©▀^ė▓╝■╔²╝ēį┌Č╠Ų┌ā╚─▄ē“╠ßĖ▀┬Ęė╔Ų„Ą─ąį─▄Ż¼Ą½╩▄ė▓╝■ąį─▄Ž▐ųŲŻ¼āHę└┐┐ė▓╝■╔²╝ē¤oĘ©ØMūŃ╗ź┬ōŠW┐ņ╦┘░lš╣Ą─ąĶ꬯¼×ķ┴╦┐╦Ę■ė▓╝■Ą─ąį─▄╩°┐`Ż¼ę╗ą®┬Ęė╔Ų„į┌öĄō■ŲĮ├µ▓╔ė├ČÓÖC╣±Ęų▓╝╩Į╗ź▀BĄ─╝»╚║¾wŽĄĮYśŗ╠ßĖ▀▐D░ląį─▄Ż¼Ą½─┐Ū░┬Ęė╔Ų„┐žųŲŲĮ├µų╗ėąę╗éĆ┐žųŲå╬į¬╠Ä└Ē┐žųŲ╚╬䚯¼öĄō■ŲĮ├µęÄ─ŻöUš╣īóį÷╝ė┐žųŲŲĮ├µĄ─žō▌dŻ¼╚▌ęūįņ│╔┐žųŲå╬į¬▀^▌dĪŻ
─┐Ū░ī”┬Ęė╔Ų„Ą─蹊┐┤¾▓┐Ęų╝»ųąį┌öĄō■ŲĮ├µŻ¼ī”ė┌ųØu│╔×ķ┬Ęė╔Ų„ąį─▄Ų┐ŅiĄ─┐žųŲŲĮ├µ╚▒Ę”│╔¾wŽĄĄ─蹊┐Ż¼×ķ┴╦ĮŌøQ¼Fėą┬Ęė╔Ų„┐žųŲŲĮ├µ╗∙ė┌å╬ę╗┐žųŲå╬į¬Ą─╝»ųą╩Į┐žųŲ╦∙├µ┼RĄ─å¢Ņ}Ż¼čąŠ┐╚╦åT╠ß│÷┴╦┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲĘĮ░ĖĪŻ
×ķ┴╦Ė³║├Ąž┴╦ĮŌ┬Ęė╔Ų„╝»ųą┐žųŲ┼cĘų▓╝╩Į┐žųŲĄ─╠ž³cŻ¼╬ęéāÅ─┐╔┐┐ąįĪó┐╔öUš╣ąį║═▓┐╩┤·ārĄ╚ĘĮ├µī”╦³éā▀Mąą┴╦▒╚▌^Ż¼╚ń▒ĒŻ▒╦∙╩ŠĪŻ
┬Ęė╔Ų„┐žųŲŲĮ├µĘų▓╝╩Į╗ź▀B║═ČÓīŹ└²▓óąą┐╔ėąą¦Ąž▒▄├Ōå╬ę╗ė▓╝■╗“▄ø╝■╩¦ą¦ī¦ų┬Ą─ŠWĮjš±╩ÄŻ¼╠ßĖ▀ŠWĮjĘĆČ©ąį║═┬Ęė╔Ų„╚▌Õe─▄┴”Ż¼Ęų▓╝╩Į┐žųŲ─▄ē“ų¦│ųąį─▄║═╣”─▄Ą─ņ`╗ŅöUš╣Ż¼╠ßĖ▀┬Ęė╔Ų„Ą─┐╔öUš╣ąįŻ¼┐žųŲå╬į¬ų«ķg║═┐žųŲå╬į¬┼c▐D░lå╬į¬ų«ķgĘųō·žō▌dŻ¼┐╔┐╦Ę■å╬ę╗ė▓╝■Ą─ąį─▄Ų┐ŅiŻ¼£p╔┘┐žųŲå╬į¬▀^▌dŻ¼╠ßĖ▀┬Ęė╔Ų„Ą─┐╔┐┐ąįŻ¼ė▓╝■Ęų▓╝╩Į╗ź▀B║═▄ø╝■╣”─▄Ęų▓╝╩ĮĪó─ŻēK╗»įOėŗ║═īŹ¼F┐╔īŹ¼F▓╗ųąöÓĘ■äš╔²╝ēŻ¼╠ßĖ▀┬Ęė╔Ų„Ą─┐╔ė├ąįŻ¼Ą½┼c╝»ųą╩Į┐žųŲŽÓ▒╚Ż¼Ęų▓╝╩Į┐žųŲ┤µį┌ā╚▓┐═©ą┼ķ_õN┤¾║═─▄║─Ė▀Īó╣▄└Ē║═ŠSūoÅ═ļsĄ╚▓╗ūŃĪŻ
▒ĒŻ▒ ┬Ęė╔Ų„╝»ųą╩Į┐žųŲ┼cĘų▓╝╩Į┐žųŲ▒╚▌^
╬─½IŻ█ŻĄŻ▌ļm╚╗░┤ššĘųīė─Żą═ŠC╩÷┴╦┐╔öUš╣┬Ęė╔Ų„─┐Ū░Ą─蹊┐▀Mš╣Ż¼Ą½╦³ųž³cĘų╬÷║═▒╚▌^┴╦öĄō■ŲĮ├µĄ─öUš╣ĘĮ░ĖŻ¼Č°ī”┐žųŲŲĮ├µ—▀@éĆųŲ╝s┬Ęė╔Ų„┐╔öUš╣Ą─Ų┐Ņi║═ĻPµIå¢Ņ}╚▒╔┘ŽĄĮy║═ßśī”ąįĘų╬÷ĪŻ
▒Š╬─╔Ņ╚ļŲ╩╬÷┴╦┬Ęė╔Ų„╝»ųą┐žųŲ┤µį┌Ą─ŠųŽ▐ąįŻ¼┐éĮY│÷┬Ęė╔Ų„┐žųŲŲĮ├µÅ─╝»ųą╩ĮŽ“Ęų▓╝╩Į░lš╣ąĶę¬ĮŌøQ╚²éĆĻPµIå¢Ņ}Ż║Ż©Ż▒Ż®Ęų▓╝╩Į┐žųŲŲĮ├µŻ¼ė╔ČÓéĆ┐žųŲå╬į¬Ęų▓╝╩Į╗ź▀BČ°│╔Ą─Ęų▓╝╩Į┐žųŲŲĮ├µ┐╔ėąą¦┐╦Ę■å╬ę╗┐žųŲå╬į¬Ą─ąį─▄Ų┐Ņi║═┐╔öUš╣ąį▓ŅĄ╚▓╗ūŃŻ¼×ķ┐žųŲŲĮ├µĄ─ąį─▄║═╣”─▄ņ`╗ŅöUš╣╠ß╣®ų¦│ųŻ╗Ż©Ż▓Ż®Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐═©ą┼Ż¼╬’└Ē╔ŽĘų▓╝Ą─┐žųŲå╬į¬║═▄ø╝■╣”─▄─ŻēKꬹ╬│╔ę╗éĆš¹¾wŻ¼ąĶę¬Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐═©ą┼ģfūhīŹ¼Fė▓╝■║═▄ø╝■Ą─═Ė├„═©ą┼Ż╗Ż©Ż│Ż®Ęų▓╝╩Į┬Ęė╔ģfūhŻ¼×ķ▀mæ¬Ęų▓╝╩Į┐žųŲŲĮ├µ¾wŽĄĮYśŗŻ¼┬Ęė╔ģfūh║═╦ŃĘ©æ¬Ęų▓╝╩ĮīŹ¼FŻ¼│õĘų└¹ė├ŽĄĮyĄ─ėŗ╦Ń║═┤µā”┘Yį┤Ż¼╠ßĖ▀┬Ęė╔Ų„Ą─ąį─▄Ż¼▒Š╬─ųž³cć·└@▀@╚²éĆĻPµIå¢Ņ}ŠC╩÷┴╦▀@ę╗ŅIė“Ą─ūŅą┬蹊┐▀Mš╣Ż¼▓óī”Ė„ĘNĘĮ░Ė▀Mąą┴╦Ęų╬÷║═▒╚▌^ĪŻ
Ż▓ ┬Ęė╔Ų„╝»ųą┐žųŲ├µ┼RĄ─ų„ę¬å¢Ņ}
Ż▓.Ż▒ ąį─▄Ų┐Ņi
─┐Ū░┬Ęė╔Ų„┐žųŲŲĮ├µų╗ėąę╗éĆ┐žųŲå╬į¬╠Ä└ĒģfūhĘųĮMŻ¼Ż╔ŻßŻŅŻŅŻßŻŃŻŃŻ’ŻŅŻÕŻ¼ŻŪĄ╚╚╦═©▀^ŠWĮj£y┴┐Ą├│÷Ż¼ŻĄŻ░ŻźĄ─ŠWĮj╣╩šŽ┐╔─▄ę“┬Ęė╔Ų„┐žųŲŲĮ├µ▀^▌düG╩¦“ą─╠°”Ž¹Žóę²ŲŻ¼Ė∙ō■─┐Ū░╗ź┬ōŠWĄ─░lš╣╦┘Č╚║═ė▓╝■╝╝ąg░lš╣╦┘Č╚Ż¼╗∙ė┌å╬ę╗┐žųŲå╬į¬Ą─╝»ųą╩Į┐žųŲŲĮ├µ║▄ļyØMūŃ╗ź┬ōŠW┐ņ╦┘į÷ķLĄ─ąĶŪ¾ĪŻ
Ż▓.Ż▓ å╬³c╩¦ą¦
¼Fėą┬Ęė╔ģfūh┤¾▓┐Ęų╝»ųąį┌ų„┐žųŲå╬į¬╔Ž▀\ąąŻ¼║▄╚▌ęūę“ė▓╝■╗“▄ø╝■Šų▓┐╣”─▄╩¦ą¦╗“┤·┤aÕeš`ī¦ų┬š¹éĆģfūh╩¦ą¦Ż¼└²╚ńŻ║ÓÅŠėĮ©┴ó┼cŠSūo╣”─▄╩¦ą¦īóī¦ų┬š¹éĆģfūh╩¦ą¦Ż¼ļm╚╗¼Fėą┬Ęė╔Ų„┐žųŲŲĮ├µ▓╔ė├ų„ĪóÅ─éõĘ▌ĘĮ╩ĮŻ¼Ą½╩Ūų„ĪóÅ─éõĘ▌Ą─╩¦ą¦╗ųÅ═╦┘Č╚ŽÓī”▌^┬²Ż¼ė░Ēæ┴╦ŠWĮjĄ─┐╔ė├ąįŻ¼×ķ╠ßĖ▀ŠWĮj┐╔ė├ąįŻ¼─┐Ū░═©▀^Ž“ŠWĮjųąį÷╝ė┬Ęė╔Ų„║═▀\ąą╠ōöM┬Ęė╔Ų„╚▀ėÓģfūhŻ©ŻųŻķŻ“Ż¶Ż§ŻßŻņŻęŻ’Ż§Ż¶ŻÕŻ“ŻęŻÕŻõŻ§ŻŅŻõŻßŻŅŻŃŻ∙ŻąŻ“Ż’Ż¶Ż’ŻŃŻ’ŻņŻ¼║åĘQŻųŻęŻęŻąŻ®īŹ¼F╚▀ėÓéõĘ▌Ż¼▀@╠ßĖ▀┴╦ŠWĮjĄ─▀\ĀI│╔▒ŠŻ¼į÷╝ė┴╦ŠWĮj▀BĮėĄ─Å═ļsČ╚║═ŠWĮj╣▄└ĒĄ─ļyČ╚ĪŻ
Ż▓.Ż│ ┐╔öUš╣ąį▓Ņ
Ė„┬Ęė╔Ų„ÅS╔╠Č╝▓╔ė├╦Įėą╝╝ągŻ¼ĘųäeįOėŗĖ„ūįīŻė├Ą─▓┐╝■ĪóĮė┐┌║══©ą┼ģfūhŻ¼▓╗═¼╔·«aÅS╔╠Ą─┬Ęė╔Ų„▓┐╝■ų«ķg▓╗─▄╗źōQ║══©ą┼Ż¼ę“┤╦Ż¼į┌ŠWĮjųąŻ¼▀@ą®┬Ęė╔Ų„ų╗─▄ū„×ķ¬Ü┴óĄ─ŠWĮjįOéõ╗ź▀BŻ¼Č°▓╗─▄═©▀^╗ź▀BöUš╣×ķę╗┼_Ė³Ė▀ąį─▄║═Ė³ČÓ╣”─▄Ą─┬Ęė╔Ų„Ż¼╝╝ągĘŌķ]╦Įėą║═╝»ųą┐žųŲć└ųžė░Ēæ┴╦┬Ęė╔Ų„Ą─┐╔öUš╣ąįĪŻ
╗∙ė┌┬Ęė╔Ų„╝»ųą┐žųŲ╦∙├µ┼RĄ─å¢Ņ}Ż¼čąŠ┐╚╦åT╠ß│÷┴╦┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲĘĮ░ĖŻ¼═©▀^Ęų▓╝╩Į╗ź▀BĪó▓óąą╠Ä└Ē║═╚▀ėÓéõĘ▌Ą╚╝╝ąg╠ßĖ▀┬Ęė╔Ų„Ą─ąį─▄Īó┐╔┐┐ąį║═┐╔öUš╣ąįĪŻ
ļm╚╗┬Ęė╔Ų„Ęų▓╝┐žųŲ╩Ūę╗ĘN░lš╣┌ģä▌Ż¼Ą½╩ŪļSų°ė▓╝■╠Ä└Ē─▄┴”Ą─▓╗öÓ╠ßĖ▀Ż¼╝»ųą╩Į▀ĆīóķLŲ┌┤µį┌Ż¼Ż┬ŻßŻņ¬▓ŻņŻßŻŅŻķŻ¼Ż╚ŻķŻ¶ŻÕŻ¾ŻĶĄ╚╚╦蹊┐▒Ē├„ā╔ĘN┐žųŲĘĮ╩ĮŽÓĮY║Žīóėąą¦čėķL¼Fėą┬Ęė╔Ų„Ą─╔·┤µų▄Ų┌Ż¼Ė─▀MŠWĮjąį─▄ĪŻ
Ż│ Ęų▓╝╩Į┐žųŲŲĮ├µ
┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲŲĮ├µų„ę¬Ęų×ķ╝»╚║┬Ęė╔Ų„Ż©Ż├ŻņŻ§Ż¾Ż¶ŻÕŻ“ŻęŻ’Ż§Ż¶ŻÕŻ“Ż¼║åĘQŻ├ŻęŻ®║═▐D░l┼c┐žųŲĘųļxŻ©ŻŲŻ’Ż“¬▓Ż„ŻßŻ“ŻõŻķŻŅŻńŻßŻŅŻõŻ├Ż’ŻŅŻ¶Ż“Ż’ŻņŻ┼ŻņŻÕŻĒŻÕŻŅŻ¶Ż¾ŻėŻÕŻŻßŻ“ŻßŻ¶ŻķŻ’ŻŅŻ¼║åĘQŻŲŻ’Ż“Ż├Ż┼ŻėŻ®ā╔ĘNĮYśŗĪŻ
Ż│.Ż▒ Ż├Żę
Ż├Żę╩ŪČÓéĆ┐╔¬Ü┴ó▀\ąąĄ─ĪóŠ▀ėą┬Ęė╔╣”─▄Ą─╣سc═©▀^─│ĘN╗ź▀BĮYśŗŻ©└²╚ńŻ║Ė▀╦┘ęį╠½ŠWŻ®▀BĮė│╔ąį─▄Īó╣”─▄┐╔öUš╣Ą─å╬ė│Ž±┬Ęė╔Ų„Ż¼╝»╚║┬Ęė╔Ų„Ė∙ō■ā╚▓┐╣سcĄ─ŅÉą═┐╔Ęų×ķ▄ø╝■╝»╚║┬Ęė╔Ų„║═╝»╚║┬Ęė╔Ų„ĪŻ
▄ø╝■╝»╚║┬Ęė╔Ų„ė╔ę╗┼_┬Ęė╔Ų„┼cČÓ┼_Š▀ėą┬Ęė╔╠Ä└Ē─▄┴”Ą─ŻąŻ├ÖCŽÓ▀BČ°│╔Ż¼▄ø╝■╝»╚║┬Ęė╔Ų„═©▀^Ž“╝»╚║ųąį÷╝ė┬Ęė╔╠Ä└Ē╣سcöUš╣┬Ęė╔Ų„Ą─ąį─▄║═╣”─▄Ż¼─┐Ū░▒╚▌^Ąõą═Ą─▄ø╝■╝»╚║┬Ęė╔Ų„ėąŻ├Ż╠Ż┴ŻęŻ┴ĪóŻėŻ§ŻÕŻ·║═ŻųŻ┼¬▓ŻęŻ┴Ż¼▄ø╝■╝»╚║┬Ęė╔Ų„ĮĶų·ČÓéĆ┬Ęė╔╠Ä└Ē╣سc▓󹹯¼īŹ¼FĘų▓╝╩Į┐žųŲå╬į¬ķgĄ─žō▌dĘųō·Ż¼╠ßĖ▀┬Ęė╔╠Ä└Ēąį─▄Ż¼ČÓ┼_ŻąŻ├ÖC║═ę╗┼_┬Ęė╔Ų„ĮM│╔Ą─Ęų▓╝╩Į┐žųŲŲĮ├µ┐╔īŹ¼F╣”─▄║═ąį─▄ņ`╗ŅöUš╣Ż¼▓┐╩┤·ār▒╚▌^Ą═Ż¼Ą½▄ø╝■╝»╚║┬Ęė╔Ų„▓╗ų¦│ųöĄō■ŲĮ├µĄ─öUš╣Ż¼¤oĘ©╠ßĖ▀öĄō■ŲĮ├µąį─▄Ż¼į┌▄ø╝■╝»╚║┬Ęė╔Ų„ųąŻ¼┬Ęė╔Ų„╣سc╩¦ą¦Ģ■ī¦ų┬š¹éĆŽĄĮy▓╗┐╔ė├Ż¼ĮĄĄ═┴╦ŽĄĮyĄ─┐╔┐┐ąįĪŻ
┼c▄ø╝■╝»╚║┬Ęė╔Ų„ŽÓ▒╚Ż¼╝»╚║┬Ęė╔Ų„Ż╚Ż├ŻęĄ─ā╚▓┐╣سcČ╝╩ŪŠ▀ėą┬Ęė╔║═▐D░l╣”─▄Ą─┬Ęė╔Ų„Ż¼į┌╝»╚║┬Ęė╔Ų„ā╚▓┐Ż¼╣سcų«ķgĘųō·žō▌dŻ¼▓óąą╠Ä└Ē▓╗═¼ģfūhĄ─ĘųĮMŻ¼Ęų▓╝╩Į┐žųŲå╬į¬ų«ķg╣”─▄┐╔ŽÓ╗ź╚▀ėÓéõĘ▌Ż¼─▄ē“ų¦│ųöĄō■ŲĮ├µĄ─ņ`╗ŅöUš╣ĪŻ
ė╔ė┌╝»╚║┬Ęė╔Ų„Ą─ūŅąĪĮM│╔å╬į¬╩Ū┬Ęė╔Ų„Ż¼┐žųŲå╬į¬┼c▐D░lå╬į¬ų«ķg▓╔ė├╦Įėąģfūh║═īŻė├Įė┐┌═©ą┼Ż¼ę“┤╦Ż¼ā╚▓┐╣سcĄ─╗ź▀BąĶę¬ī”┬Ęė╔Ų„▀MąąŽÓæ¬Ą─ą▐Ė─Ż¼į÷╝ė┴╦▓┐╩┤·ārĪŻ
Ż│.Ż▓ ŻŲŻ’Ż“Ż├Ż┼Żė
ŻŲŻ’Ż“Ż├Ż┼Żė¾wŽĄĮYśŗ╚ńłDŻ▒╦∙╩ŠŻ¼ŻŲŻ’Ż“Ż├Ż┼Żė¾wŽĄĮYśŗį╩įSę╗┼_┬Ęė╔Ų„Ą─┐žųŲŲĮ├µėąČÓéĆ┐žųŲå╬į¬Ż¼╦³éāų«ķg═©▀^ā╚▓┐Ė▀╦┘ŠWĮj╗ź▀BŻ¼┐žųŲå╬į¬Ż©Ż├Ż┼Ż®┼c▐D░lå╬į¬Ż©ŻŲŻ┼Ż®┐╔▓╔╚ĪŅAŽ╚┼õų├╗“äėæB┬ō║ŽĄ─ĘĮ╩ĮīŹ¼F┬Ęė╔Ų„ŽÓæ¬Ą─╣”─▄Ż¼Ż├Ż┼║═ŻŲŻ┼ķgĄ─ūįė╔┬ō║Ž┐╔ņ`╗ŅöUš╣┬Ęė╔Ų„Ą─ąį─▄║═╣”─▄Ż¼┐žųŲå╬į¬ų«ķg┐╔▒╦┤╦Ęųō·žō▌dĪó╚▀ėÓéõĘ▌║═īŹ¼FĘų▓╝╩Į┐žųŲŻ¼ŻŲŻ’Ż“Ż├Ż┼Żė¾wŽĄĮYśŗ×ķę╗┼_┬Ęė╔Ų„ā╚▓┐ČÓéĆ┐žųŲå╬į¬Ęų▓╝╩Į╗ź▀B║═ęÄ─ŻöUš╣╠ß╣®┴╦ę╗ĘNņ`╗ŅĄ─ÖCųŲŻ¼ŻŲŻ┼Ż»Ż├Ż┼ĪóŻŲŻ┼Ż»ŻŲŻ┼ĪóŻ├Ż┼Ż»Ż├Ż┼ķgĄ─ś╦£╩Įė┐┌║═ŻŲŻ┼Ż»Ż├Ż┼ķgĄ─ŻŲŻ’Ż“Ż├Ż┼Żė═©ą┼ģfūh×ķ┐žųŲŲĮ├µĄ─ąį─▄║═╣”─▄ņ`╗ŅöUš╣╠ß╣®┴╦ų¦│ųŻ¼═©▀^ś╦£╩╗»Ą─ÖCųŲŻ¼Ż├Ż┼║═ŻŲŻ┼ūā│╔ŽÓ╗źĘųļxĄ─ś╦£╩ĮM╝■Ż¼┐╦Ę■┴╦╝»╚║┬Ęė╔Ų„┐žųŲå╬į¬║═▐D░lå╬į¬▓╗─▄ĘųļxĄ─▓╗ūŃŻ¼┐╔ī”Ż├Ż┼║═ŻŲŻ┼öĄ┴┐ņ`╗ŅöUš╣Ż¼ėąą¦┐╦Ę■å╬éĆ▓┐╝■ąį─▄Ą─╩°┐`Ż¼čėķL┬Ęė╔Ų„╔·┤µų▄Ų┌Ż¼▒Żūo═Č┘YŻ¼
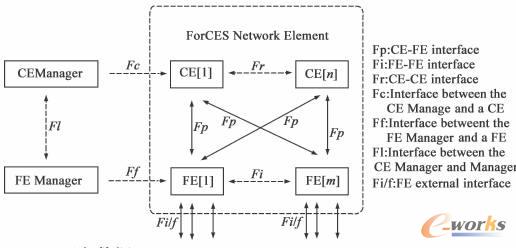
łD1 ForCES¾wŽĄĮYśŗ
ŻŲŻ’Ż“Ż├Ż┼ŻėĘĮ░Ėļm╚╗×ķ┬Ęė╔Ų„īŹ¼F┐žųŲå╬į¬ĪóöĄō■å╬į¬Ą─ęÄ─ŻöUš╣║═öUš╣┬Ęė╔Ų„Ą─╣”─▄╠ß╣®┴╦ę╗ĘNņ`╗ŅÖCųŲŻ¼Ą½╩ŪŻ¼╦³ų╗╠ß│÷┴╦Ęų▓╝╩Į┐žųŲŲĮ├µ¾wŽĄĮYśŗ║═Ż├Ż┼┼cŻŲŻ┼ų«ķgĄ─ŻŲŻ’Ż“Ż├Ż┼Żė═©ą┼ģfūhŻ¼ø]ėąī”┬Ęė╔▄ø╝■▀MąąĘų▓╝╩ĮĪó─ŻēK╗»įOėŗĪŻ
Ż─Ż═ŻęŻ©Ż─ŻÕŻŃŻÕŻŅŻ¶Ż“ŻßŻņŻķŻ·ŻÕŻõŻ═Ż’ŻõŻ§ŻņŻßŻ“ŻęŻ’Ż§Ż¶ŻÕŻ“Ż¼║åĘQŻ─Ż═ŻęŻ®╩Ū╗∙ė┌ŻŲŻ’Ż“Ż├Ż┼Żė┐“╝▄īŹ¼FĄ─Ęų▓╝╩Į─ŻēK╗»┬Ęė╔Ų„Ż¼į┌Ż─Ż═ŻęųąŻ¼Ż├Ż┼║═ŻŲŻ┼╩Ū¬Ü┴óĄ─ś╦£╩ĮM╝■Ż¼įOėŗėąś╦£╩Ą─ŻŲŻ’Ż“Ż├Ż┼ŻėĮė┐┌Ż¼ŽÓ╗ź═©▀^ā╚▓┐Ė▀╦┘ęį╠½ŠW╗ź▀BŻ¼Ż─Ż═Żę┬Ęė╔Ų„ų¦│ų┐žųŲå╬į¬öĄ┴┐║═┐žųŲŲĮ├µ╣”─▄Ą─ņ`╗ŅöUš╣Ż¼═©▀^ā╚▓┐═©ą┼ģfūhŻŲŻ’Ż“Ż·Ż©ŻŲŻ’Ż“Ż├Ż┼ŻėŻ’ŻŅŻ·ŻÕŻŌŻ“ŻßŻ¼║åĘQŻŲŻ’Ż“Ż·Ż®Ż¼ČÓéĆĘų▓╝╩Į╗ź▀BĄ─┐žųŲå╬į¬Š█║Ž×ķę╗éĆš¹¾wŻ¼▒╦┤╦Ęųō·žō▌d║═╚▀ėÓéõĘ▌Ż¼Ż─Ż═Żęī”┬Ęė╔ģfūh▀Mąą┴╦╣”─▄ĘųĮŌ║═─ŻēK╗»įOėŗŻ¼īó┬Ęė╔ģfūhĄ─ÓÅŠėĮ©┴ó┼cŠSūo╣”─▄▀węŲĄĮ▐D░lå╬į¬╔ŽīŹ¼FŻ¼└¹ė├▐D░lå╬į¬Ą─╠Ä└Ē┘Yį┤Ęųō·┐žųŲŲĮ├µĄ─žō▌dŻ¼īŹ¼F┴╦┬Ęė╔ģfūhĘųĮMĄ─▓óąą╠Ä└ĒŻ¼╠ßĖ▀┴╦┬Ęė╔Ų„ī”ŠWĮjūā╗»Ą─Ėąų¬─▄┴”║═┬Ęė╔ģfūhĄ─┐╔ė├ąįŻ¼ČÓéĆ┐žųŲå╬į¬Ęų▓╝╩Į╗ź▀B║═┬Ęė╔ģfūhĄ─╣”─▄Ęų▓╝┐╔╠ßĖ▀┬Ęė╔Ų„Ą─┐╔┐┐ąįĪŻ
ė╔ė┌Ż├Ż┼┼cŻŲŻ┼Ą─ś╦£╩╗»ąĶę¬ę╗Č╬▌^ķLĄ─ĢrķgŻ¼į┌Č╠ĢrŲ┌ā╚Ż¼▀@ĘNĘĮ░Ė▀Ć║▄ļy¾w¼F╦³Ą─ā×ä▌Ż¼Ą½╩ŪŻ¼Ż─Ż═ŻęīŹ¼F┴╦╗∙ė┌ŻŲŻ┼┼cŻ├Ż┼ĘųļxĄ─ČÓéĆ┐žųŲå╬į¬ķgĄ─Ęų▓╝╩Į╗ź▀BĄ─įŁą═ŽĄĮyŻ¼×ķ┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲŲĮ├µĄ─įOėŗ╠ß╣®┴╦║▄║├Ą─ģó┐╝║═ĮĶĶbū„ė├ĪŻ
Ż┤ Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐═©ą┼
ļSų°┬Ęė╔Ų„┐žųŲŲĮ├µė╔╝»ųą╩ĮŽ“Ęų▓╝╩Į░lš╣Ż¼×ķ┴╦╩╣╬’└Ē╔ŽĘų▓╝╩Į╗ź▀BĄ─┐žųŲå╬į¬║═▐D░lå╬į¬ĮM║Ž│╔ę╗┼_═Ļš¹Ą─┬Ęė╔Ų„Ż¼ąĶę¬įOėŗ║═īŹ¼FĘų▓╝╩Į┐žųŲŲĮ├µā╚▓┐═©ą┼ģfūhŻ¼─┐Ū░Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐═©ą┼ĘĮ░Ėų„ę¬ėą╝»╚║┬Ęė╔Ų„ā╚▓┐═©ą┼ģfūhŻ©ŻęŻ’Ż§Ż¶ŻÕŻ“Ż├ŻņŻ§Ż¾Ż¶ERPŻ“Ż’Ż¶Ż’ŻŃŻ’ŻņŻ¼║åĘQŻęŻ├ŻąŻ®║═ŻŲŻ’Ż“Ż·ā╔ĘNĪŻ
Ż┤.Ż▒ ŻęŻ├Żą
Ż╩.Ż┬-ŻŪŻ§ŻßŻŅĄ╚╚╦įOėŗ┴╦╝»╚║┬Ęė╔Ų„ā╚▓┐═©ą┼ģfūhŻęŻ├ŻąŻ¼Ųõā╚▓┐Įė┐┌║═ģfūh┐“╝▄─Żą═╚ńłDŻ▓╦∙╩ŠĪŻ
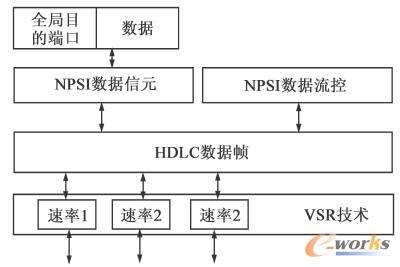
łD2 RCPģfūhā╚▓┐Įė┐┌║═ģfūh┐“╝▄─Żą═
═©▀^ŻęŻ├ŻąģfūhŻ¼╝»╚║┬Ęė╔Ų„ā╚▓┐Ė„╣سcČ╝┐╔½@Ą├ĮM│╔įō╝»╚║┬Ęė╔Ų„Ą─╣سcöĄ┴┐ĪóŠÄ╠¢ĪóÓÅŠė╣سcĄ─ąį─▄║═ŅÉą═Īóā╚▓┐Č╦┐┌╠¢║══Ō▓┐Č╦┐┌╠¢Ą╚ą┼ŽóŻ¼╝»╚║┬Ęė╔Ų„ā╚▓┐Ė„╣سcą╬│╔ī”š¹éĆ╝»╚║┬Ęė╔Ų„ę╗ų┬Ą─ā╚▓┐═žōõęĢłDŻ¼į┌▐D░lŲĮ├µ╔ŽŻ¼ČÓéĆ┬Ęė╔Ų„╣سc═©▀^ś╦£╩╗ź▀B┐©╗ź▀BĪŻ
╝»╚║┬Ęė╔Ų„ā╚▓┐╗ź▀BĮė┐┌Ą─╬’└Ēīė▓╔ė├Ė▀╦┘╣Ō╗ź▀B╝╝ągŻ©ŻųŻÕŻ“Ż∙ŻėŻĶŻ’Ż“Ż¶ŻęŻÕŻßŻŃŻĶŻ¼║åĘQŻųŻėŻęŻ®Ż╗µ£┬Ęīė╩╣ė├│Żė├Ą─Ė▀╝ēöĄō■µ£┬Ę┐žųŲŻ©Ż╚ŻķŻńŻĶŻ╠ŻÕŻ÷ŻÕŻņŻ─ŻßŻ¶ŻßŻ╠ŻķŻŅŻļŻ├Ż’ŻŅŻ¶Ż“Ż’ŻņŻ¼║åĘQŻ╚Ż─Ż╠Ż├Ż®Ä¼ĘŌčbĖ±╩ĮŻ¼═©▀^ųŲČ©ČÓĘN╦┘┬╩Ą╚╝ēéõ▀xŻ¼ØMūŃ┴╦╝»╚║┬Ęė╔Ų„ā╚▓┐▓╗═¼╦┘┬╩╗ź▀BĄ─ąĶ꬯¼╠ßĖ▀┴╦╗ź▀BĄ─ņ`╗ŅąįŻ¼é„▌öĄ─öĄō■ļųą░³║¼Ę¹║ŽŻ╬ŻąŻėŻ╔ęÄĘČĄ─öĄō■ą┼į¬║═┴„┐žą┼į¬ā╔ĘNĖ±╩ĮŻ¼öĄō■ą┼į¬Į╗ōQöĄō■ł¾╬─Ż¼┴„┐žą┼į¬Į╗ōQ╝»╚║┬Ęė╔Ų„ā╚▓┐Ė„éĆĮ╗ōQŠWĮjĄ─┴„┴┐┐žųŲą┼ŽóŻ¼öĄō■ą┼į¬Ņ^▓┐ĖĮ╝ėę╗éĆ░³║¼ą┼į¬╚½Šų─┐Ą─Č╦┐┌ą┼ŽóĄ─ś╦║ׯ¼į┌╦³╦∙Įø▀^Ą─├┐ę╗éĆĮ╗ōQŠWĮj╣سcĄ─ā╚▓┐╗ź▀B┐©╔ŽŻ¼╗ź▀B┐©Ė∙ō■╚½ŠųČ╦┐┌įOéõęĢłD┼c▒ŠĄžĮ╗ōQŠWĮjČ╦┐┌Ą─ė│╔õĻPŽĄ┤_Č©▒ŠĄžĮ╗ōQŠWĮjĄ──┐Ą─Č╦┐┌Ż¼īóą┼į¬╦══∙▒ŠĄžĮ╗ōQŠWĮj▀MąąĮ╗ōQĪŻ
į┌┐žųŲŲĮ├µŻ¼ČÓéĆ┐žųŲå╬į¬═©▀^ŻęŻ├ŻąģfūhĮ╗ōQ═žōõą┼ŽóŻ¼ą╬│╔Įyę╗Ą─╝»╚║┬Ęė╔Ų„╣▄└ĒęĢłD║═įOéõęĢłDŻ¼ŽÓ╗źķgģf═¼┬Ęė╔ėŗ╦Ń║═ģfūh╠Ä└ĒŻ¼═¼▓Į▐D░l▒ĒĄ╚╣”─▄Ż¼ė╔ė┌ŻęŻ├ŻąĘĮ░Ėų╗įOėŗ┴╦╝»╚║┬Ęė╔Ų„ā╚▓┐═©ą┼ģfūhĄ─┐“╝▄Ż¼ø]ėą┐╔ģó┐╝Ą─ģfūhĄ─Š▀¾w╣żū„ÖCųŲŻ¼Č°Ūę╦³ų╗▀mė├ė┌╝»╚║┬Ęė╔Ų„ā╚▓┐╣سcķgĄ─═©ą┼║═öĄō■Į╗ōQŻ¼Š▀ėąę╗Č©Ą─ŠųŽ▐ąįĪŻ
Ż┤.Ż▓ ŻŲŻ’Ż“Ż·
ŻŽŻ¼Ż╚ŻßŻńŻ¾ŻßŻŅŻõĄ╚╚╦╗∙ė┌ķ_į┤┬Ęė╔▄ø╝■Ż┌ŻÕŻŌŻ“Żß║═ŻŲŻ’Ż“Ż├Ż┼Żė¾wŽĄĮYśŗįOėŗ┴╦┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐Ą─═©ą┼ģfūhŻŲŻ’Ż“Ż·Ż¼ŻŲŻ’Ż“Ż·ģfūhį┌ŻŲŻ’Ż“Ż├Ż┼Żėģfūh┐“╝▄Ą─╗∙ĄA╔ŽŻ¼ī”Ųõā╚▓┐═©ą┼ÖCųŲ▀Mąą┴╦öUš╣Ż¼┐╔īŹ¼FŻ├Ż┼Ż»ŻŲŻ┼Ż¼Ż├Ż┼Ż»Ż├Ż┼Ż¼ŻŲŻ┼Ż»ŻŲŻ┼ķgĄ─═©ą┼Ż¼ŲõŽ¹ŽóĖ±╩Į╚ńłDŻ│╦∙╩ŠŻ¼ŻŲŻ’Ż“Ż·ģfūhĄ─═©ą┼ÖCųŲĘų×ķŻ║┬ō║ŽĪó┼õų├║═öĄō■é„▌ö╚²éĆļAČ╬ĪŻ
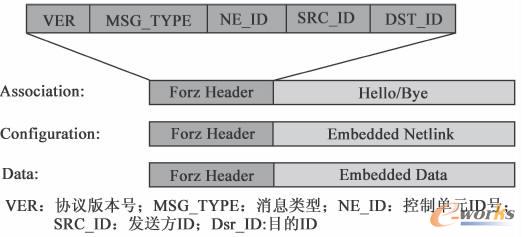
łD3 ForzģfūhŽ¹ŽóĖ±╩Į
į┌┬ō║ŽļAČ╬Ż¼├┐éĆŻ├Ż┼╗“ŻŲŻ┼═©▀^Ż╔Żą┐╔┐┐ĮM▓źĄ─ĘĮ╩ĮŽ“═¼ĮMā╚Ą─Ųõ╦³│╔åT░l╦═Ż╚ŻÕŻņŻņŻ’Ž¹ŽóŻ¼ł¾Ėµūį╔ĒĄ─ą┼ŽóŻ¼Ż╚ŻÕŻņŻņŻ’ÖCųŲ╣▄└Ē│╔åTĄ─╝ė╚ļ║═ļxķ_Ż¼═©Ėµā╚▓┐┐žųŲ║═öĄō■┴„Ą─ĮM▓źĄžųĘĪó│╔åTĄ─ą┼Žó║═ą─╠°Öz£yĪŻ
«öę╗éĆ│╔åTäé╝ė╚ļĢrŻ¼╦³Ą─│§╩╝ŻŲŻ’Ż“Ż·öĄō■Äņ×ķ┐šŻ¼╩ūŽ╚Ż¼╦³Ž“ā╚▓┐┐žųŲ┴„Ą─ĮM▓źĄžųĘ░l╦═ę╗éĆŻ╚ŻÕŻņŻņŻ’Ž¹ŽóŻ¼Ż╚ŻÕŻņŻņŻ’Ž¹Žóųą░³└©ūį╔ĒĄ─ąį─▄ĪóČ╦┐┌öĄ┴┐ĪóŅÉą═Ą╚ą┼ŽóŻ¼╩šĄĮŻ╚ŻÕŻņŻņŻ’Ž¹Žó║¾Ż¼ĮMā╚Ą─Ųõ╦³│╔åTīóą┬│╔åTĄ─ą┼Žó╝ė╚ļĄĮūį╝║Ą─öĄō■ÄņŻ¼═¼ĢrŻ¼ĮMā╚¼Fėą│╔åTŽ“ą┬╝ė╚ļĄ─│╔åT░l╦═Ż╚ŻÕŻņŻņŻ’Ž¹Žó═©Ėµūį╝║Ą─╣”─▄Īó┘Yį┤║═Č╦┐┌ĄžųĘĄ╚ą┼ŽóŻ¼╩šĄĮŽ¹Žó║¾Ż¼ą┬╝ė╚ļĄ─│╔åTŽ“ūį╝║▒ŠĄžĄ─ŻŲŻ’Ż“Ż·öĄō■Äņųą╠Ē╝ėŽÓæ¬│╔åTĄ─ą┼ŽóŻ¼«öę╗éĆ│╔åTļxķ_ĢrŻ¼╦³░l╦═Ż┬Ż∙ŻÕŽ¹ŽóŻ¼ĮMā╚Ųõ╦³│╔åT╩šĄĮ▀@éĆŽ¹Žó║¾Ż¼īó╦³Ą─ą┼ŽóÅ─öĄō■Äņųąäh│²Ż¼«öę╗éĆ│╔åT╩¦ą¦ĢrŻ¼ė╔ė┌╚▒╔┘ą─╠°Ž¹ŽóŻ¼Ųõ╦³Ą─│╔åTīóŲõÅ─öĄō■Äņųąäh│²ĪŻ
į┌┼õų├ļAČ╬Ż¼ŻŲŻ’Ż“Ż·ģfūhė├ė┌äōĮ©Īóäh│²║═½@╚ĪŠWĮjĮė┐┌ĪóŻ╔ŻąĄžųĘĪó┬Ęė╔ą┼Žó║═ÓÅŠėĄ─ą┼ŽóĄ╚Ż¼ŻŲŻ’Ż“Ż·ģfūh═©▀^┐╔┐┐ĮM▓źī”┼õų├ą┼Žó▀MąąĘų░lŻ¼Į©┴ó▒ŠĄžČ╦┐┌┼c╚½ŠųČ╦┐┌Ą─ė│╔õĻPŽĄŻ¼ą╬│╔ā╚▓┐ę╗ų┬Ą─┬Ęė╔▒ĒĪŻ
į┌öĄō■é„▌öļAČ╬Ż¼ŻŲŻ’Ż“Ż·ģfūhī”▒ŠĄžöĄō■▀MąąĘŌčbŻ¼╚╗║¾═©▀^ā╚▓┐ŠWĮjĮ╗ōQĄĮŽÓæ¬Ą─▌ö│÷Č╦┐┌Ż¼į┌▌ö│÷Č╦┐┌ĮŌĘŌčb║¾░l╦═ĄĮ═Ō▓┐ŠWĮjĪŻ
ŻŲŻ’Ż“Ż·īŹ¼F┴╦Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐═©ą┼Ą─╣żū„ÖCųŲ║═ģfūhŽ¹ŽóĖ±╩ĮŻ╗ī”Ęų▓╝╩Į┐žųŲŲĮ├µā╚▓┐┬Ęė╔║══©ą┼ÖCųŲĄ─įOėŗŠ▀ėą║▄║├Ą─ģó┐╝║═ĮĶĶbū„ė├ĪŻ
Ż┤.Ż│ ąĪĮY
¼FėąĄ─Ęų▓╝╩Į┐žųŲŲĮ├µĘĮ░Ė╝░Ųõā╚▓┐═©ą┼ģfūh╚ń▒ĒŻ▓╦∙╩ŠĪŻ
╝»ųą╩Į┐žųŲŲĮ├µ┬Ęė╔Ų„ā╚▓┐═©ą┼▓╔ė├╦ĮėąģfūhŻ¼╝╝ąg│╔╩ņŻ¼▓┐╩┤·ārŽÓī”▌^Ą═Ż¼Ą½ąį─▄║═╣”─▄ŽÓī”╣╠Č©Ż¼┐╔öUš╣ąį▓ŅŻ¼╝»╚║┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲå╬į¬ķg▓╔ė├ŻęŻ├Żąģfūh═©ą┼Ż¼Ą½╦³ąĶę¬ī”▓┐Ęų┬Ęė╔Ų„▀Mąąą▐Ė─Ż¼į÷╝ė┴╦▓┐╩┤·ārŻ¼ŻŲŻ’Ż“Ż├Ż┼Żė║═Ż─Ż═Żęā╚▓┐▓╔ė├ś╦£╩Ą─Įė┐┌║═ģfūh▀Mąą═©ą┼Ż¼╗∙ė┌ś╦£╩╗»ĮM╝■╚▌ęūīŹ¼Fī”┐žųŲå╬į¬Ą─╣”─▄Č©ųŲŻ¼ų¦│ųąį─▄║═╣”─▄Ą─ņ`╗ŅöUš╣Ż¼Ą½ś╦£╩╗»įOėŗ╩Ūę╗éĆķLŲ┌Ą─▀^│╠Ż¼ę“┤╦▓┐╩┤·ār─┐Ū░ŽÓī”▌^Ė▀ĪŻ

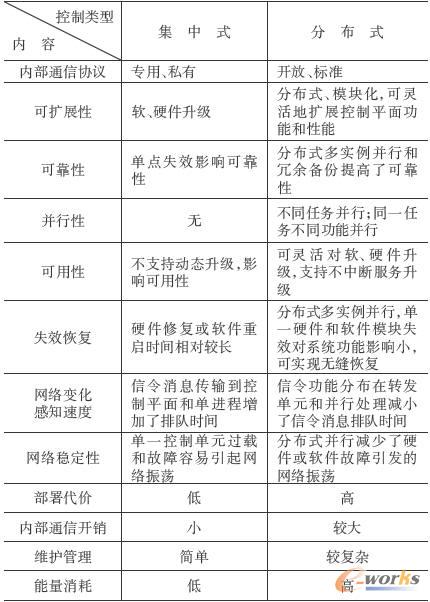
▒ĒŻ▓ ┬Ęė╔Ų„┐žųŲŲĮ├µ¾wŽĄĮYśŗ┼cā╚▓┐═©ą┼
ŻĄ Ęų▓╝╩Į┬Ęė╔ģfūh║═╦ŃĘ©
¼Fėą┬Ęė╔ģfūhĄ─╣”─▄┤¾Č╝╝»ųąį┌┐žųŲŲĮ├µŻ¼×ķ│õĘų└¹ė├Ęų▓╝╩Į┐žųŲå╬į¬║═▐D░lå╬į¬Ą─┘Yį┤Ż¼ąĶę¬ī”┬Ęė╔ģf▀Mąą╣”─▄ĘųĮŌ║═Ęų▓╝╩ĮįOėŗŻ¼īó▓╗═¼Ą─╣”─▄Ęų▓╝į┌ŽÓæ¬Ą─┐žųŲå╬į¬╗“▐D░lå╬į¬╔ŽīŹ¼FŻ¼įOėŗĘų▓╝╩Į┬Ęė╔╦ŃĘ©Ż¼│õĘų└¹ė├ČÓéĆ┐žųŲå╬į¬Ą─ėŗ╦Ń┘Yį┤Ż¼╠ßĖ▀┬Ęė╔ėŗ╦Ńąį─▄ĪŻ
ŻĄ.Ż▒ Ęų▓╝╩Į┬Ęė╔ģfūh
ŻĄ.Ż▒.Ż▒ Ż─Ż├Żą
Ż═Ż¼Ż─ŻÕŻ÷ŻßŻņĄ╚╚╦╠ß│÷┴╦Ęų▓╝╩Į┐žųŲĘĮ░ĖŻ©Ż─ŻķŻ¾Ż¶Ż“ŻķŻŌŻ§Ż¶ŻÕŻõŻ├Ż’ŻŅŻ¶Ż“Ż’ŻņŻąŻņŻßŻŅŻÕŻ¼║åĘQŻ─Ż├ŻąŻ®Ż¼īó┬Ęė╔ģfūhĄ─╣”─▄Ęų×ķ╚²ŅÉŻ║
Ż©Ż▒Ż®µ£┬ĘŽÓĻP╣”─▄Ż¼ų„ę¬░³└©ĘųĮM▐D░l║═ÓÅŠėĀŅæBŠSūoŻ¼▀@ą®╣”─▄┐╔Ęų▓╝į┌▐D░lå╬į¬╔ŽīŹ¼FŻ¼└¹ė├▐D░lå╬į¬Ą─╠Ä└Ē┘Yį┤Ęųō·┐žųŲå╬į¬Ą─žō▌dŻ¼
Ż©Ż▓Ż®ģfūh╠Ä└Ē╣”─▄Ż¼└²╚ńŻ║┬Ęė╔ėŗ╦ŃŻ¼ģfūhĀŅæBÖCĄ─ŠSūoŻ¼▀@ą®╣”─▄ąĶę¬į┌ČÓéĆ┐žųŲå╬į¬ķgīŹ¼FĘų▓╝Ż¼
Ż©Ż│Ż®Ė³ą┬┐žųŲą┼Žó╣”─▄Ż¼└²╚ńŻ¼Ė³ą┬┬Ęė╔▒ĒŻ¼▀@ą®╣”─▄║▄ļy▀MąąĘų▓╝╩ĮįOėŗŻ¼æ¬į┌┐žųŲå╬į¬īŹ¼FŻ¼Ż─Ż├ŻąĘĮ░ĖīóŻŽŻėŻąŻŲĄ─Ż╚ŻÕŻņŻņŻ’ÖCųŲ▀węŲį┌▐D░lå╬į¬īŹ¼FŻ¼ėąą¦Ąž└¹ė├┴╦▐D░lå╬į¬Ą─╠Ä└Ē┘Yį┤╠Ä└ĒģfūhĄ─ą┼┴ŅĘųĮMŻ¼Ęųō·┴╦┐žųŲå╬į¬Ą─žō▌dŻ¼£p╔┘┴╦Ż╚ŻÕŻņŻņŻ’ĘųĮMĄĮ┐žųŲŲĮ├µĄ─é„▌öĢrķgŻ¼┐sČ╠┴╦Ą╚┤²┐žųŲå╬į¬╠Ä└ĒĄ─┼┼ĻĀĢrķgŻ¼╝ė┐ņ┴╦┬Ęė╔Ų„ī”ŠWĮj╣╩šŽĄ─Ėąų¬║═Ēææ¬Ż¼ą┼┴Ņ╣”─▄Ęų▓╝į┌▐D░lå╬į¬īŹ¼F┐╔▒▄├Ō▐D░lå╬į¬ęÄ─ŻöUš╣Č°ī¦ų┬Ą─ā╚▓┐═©ą┼ķ_õNŻ¼ŠÅĮŌ┴╦öĄō■ŲĮ├µöUš╣ī”┐žųŲŲĮ├µ╠Ä└Ē─▄┴”Ą─ąĶŪ¾Ż¼ģfūhą┼┴Ņ╣”─▄Ą─Ęų▓╝║═▓󹹯¼╠ßĖ▀┴╦ģfūhĄ─┐╔┐┐ąį║═╚▌ÕeąįĪŻ
Ż─Ż├Żąļm╚╗╠ß│÷┴╦┬Ęė╔ģfūh╣”─▄Ęų▓╝Ą─įŁätŻ¼Ą½╚▒Ę”ī”┬Ęė╔ģfūh╣”─▄Ęų▓╝║═─ŻēK╗»įOėŗĄ─╝Ü╣ØĪŻ
ŻĄ.Ż▒.Ż▓ Ż═Ż├ŻąŻ┬
─ŻēK╗»Ż┬ŻŪŻąŻ©Ż═Ż’ŻõŻ§ŻņŻßŻ“Ż├Ż’ŻŅŻ¶Ż“Ż’ŻņŻąŻņŻßŻŅŻÕŻµŻ’Ż“Ż┬ŻŪŻąŻ¼║åĘQŻ═Ż├ŻąŻ┬Ż®░┤šš╣”─▄īóŻ┬ŻŪŻąģfūhäØĘų×ķą┼┴Ņ─ŻēKŻ©Ż┬ŻŪŻąŻėŻÕŻ¾Ż¾ŻķŻ’ŻŅŻ═ŻßŻŅŻßŻńŻÕŻ“Ż®║═┬Ęė╔╠Ä└Ē─ŻēKŻ©Ż┬ŻŪŻąŻąŻ“Ż’ŻŃŻÕŻ¾Ż¾ŻķŻŅŻńŻ®Ż¼ą┼┴Ņ─ŻēKĘų▓╝į┌▐D░lå╬į¬Ż¼ė├ė┌ŠSūoÓÅŠėĻPŽĄĪóĮė╩šÓÅŠė┬Ęė╔═©Ėµ║═╠Ä└Ē“ą─╠°”Ž¹ŽóĪóĘų┼õ┬Ęė╔ėŗ╦Ń╚╬䚯¼┬Ęė╔╠Ä└Ē─ŻēKĘų▓╝į┌┐žųŲå╬į¬Ż¼▀Mąą┬Ęė╔ėŗ╦ŃŻ¼═©▀^ī”Ż┬ŻŪŻąģfūh╣”─▄ĘųĮŌ║═─ŻēK╗»įOėŗŻ¼Ż═Ż├ŻąŻ┬ĘĮ░Ė┐╔īŹ¼Fī”Ż┬ŻŪŻąģfūhĘųĮM▓óąą╠Ä└ĒŻ¼─▄ē“└¹ė├▐D░lå╬į¬Ą─╠Ä└Ē┘Yį┤Ęųō·┐žųŲå╬į¬Ą─žō▌dŻ¼Ż┬ŻŪŻąŽÓæ¬Ą─╣”─▄─ŻēKĘų▓╝į┌▓╗═¼Ą─┐žųŲå╬į¬╗“▐D░lå╬į¬╔Ž▓óąą▀\ąą╠ßĖ▀┴╦┐╔┐┐ąį║═┐╔öUš╣ąįĪŻ
ŻĄ.Ż▒.Ż│ Ż─Ż├ŻąŻ┴
Ż╦-Ż╦Ż¼Ż╬ŻńŻ§Ż∙ŻÕŻŅĄ╚╚╦įOėŗ┴╦┬Ęė╔▄ø╝■Ą─Ęų▓╝╩Į┐žųŲŲĮ├µ¾wŽĄĮYśŗŻ©Ż─ŻķŻ¾Ż¶Ż“ŻķŻŌŻ§Ż¶ŻÕŻõŻ├Ż’ŻŅŻ¶Ż“Ż’ŻņŻąŻņŻßŻŅŻÕŻ┴Ż“ŻŃŻĶŻķŻ¶ŻÕŻŃŻ¶Ż§Ż“ŻÕŻ¼║åĘQŻ─Ż├ŻąŻ┴Ż®Ż¼Ęųäeī”ŻŽŻėŻąŻŲŻ»Ż╔ŻėŻ╔Żė║═Ż┬ŻŪŻąĄ╚┬Ęė╔ģfūh▀Mąą┴╦╣”─▄ĘųĮŌ║═─ŻēK╗»įOėŗŻ¼└²╚ńŻ║īóŻŽŻėŻąŻŲģfūhĘųĮŌ×ķŻŽŻ├Ż├Ż©ŻŽŻėŻąŻŲŻ├Ż’ŻŅŻ¶Ż“Ż’ŻņŻ├Ż’ŻĒŻŻ’ŻŅŻÕŻŅŻ¶Ż®─ŻēK║═ŻŽŻėŻ├Ż©ŻŽŻėŻąŻŲŻėŻķŻńŻŅŻßŻņŻķŻŅŻńŻ├Ż’ŻĒŻŻ’ŻŅŻÕŻŅŻ¶Ż®─ŻēKŻ¼ŻŽŻėŻ├─ŻēKĘų▓╝į┌▐D░lå╬į¬Ż¼ŻŽŻ├Ż├─ŻēKĘų▓╝į┌┐žųŲå╬į¬Ż¼├┐éĆ┐žųŲå╬į¬╔Ž▀\ąąĄ─┬Ęė╔ģfūh─ŻēKį┌Ųõ╦³┐žųŲå╬į¬╔ŽČ╝ŽÓæ¬ĄžéõĘ▌Ż¼╠ßĖ▀┴╦┐╔┐┐ąįŻ¼Ż─Ż├ŻąŻ┴īóŻ┬ŻŪŻąģfūhĘųĮŌ×ķŻ┬ŻŪŻąÓÅŠėĮ©┴ó┼cŠSūo─ŻēKĪó▒ŠĄž┬Ęė╔╣▄└ĒŻ©Ż╠-ŻęŻįŻ═Ż®─ŻēK║═╚½Šų┬Ęė╔╣▄└ĒŻ©ŻŪ-ŻęŻįŻ═Ż®─ŻēKŻ¼ÓÅŠėĮ©┴ó┼cŠSūo─ŻēKĘų▓╝į┌▐D░lå╬į¬Ż¼Ż╠-ŻęŻįŻ═║═ŻŪ¬▓ŻęŻįŻ═Ęų▓╝į┌▓╗═¼Ą─┐žųŲå╬į¬Ż¼├┐éĆ┐žųŲå╬į¬Ą─Ż┬ŻŪŻąÓÅŠėĮ©┴ó┼cŠSūo─ŻēKĮė╩šüĒūįÓÅŠėĄ─┬Ęė╔ą┼ŽóŻ¼Ż╠-ŻęŻįŻ═Ž╚øQ▓▀│÷▒ŠĄžūŅā×┬Ęė╔Ż¼╚╗║¾░l╦═ĮoŻŪ-ŻęŻįŻ═─ŻēKŻ¼ŻŪ-ŻęŻįŻ═─ŻēKÅ─Ė„éĆŻ╠-ŻęŻįŻ═░l╦═Ą─▒ŠĄžūŅā×┬Ęė╔ųąėŗ╦Ń│÷╚½ŠųūŅā×┬Ęė╔Ż¼Ż┬ŻŪŻą┬Ęė╔ģfūh╣”─▄Ą─Ęų▓╝║═─ŻēK╗»įOėŗ╠ßĖ▀┴╦┐žųŲŲĮ├µĄ─┐╔öUš╣ąįĪŻ
Ż─Ż├ŻąŻ┴ĘĮ░Ė×ķ┬Ęė╔ģfūhĄ─╣”─▄Ęų▓╝║═─ŻēK╗»įOėŗ╠ß╣®┴╦║▄║├Ą─ģó┐╝Ż¼ė╔ė┌Ż─Ż├ŻąŻ┴ĘĮ░Ėų╗╩ŪÅ─╣”─▄╔Ž┐╝æ]┴╦┬Ęė╔ģfūhĄ─╣”─▄Ęų▓╝Ż¼ø]ėą┐╝æ]┬Ęė╔ģfūh─ŻēKŽÓ╗źų«ķgĄ─±Ņ║ŽČ╚║══©ą┼ķ_õNŻ¼ę“┤╦Ż¼į┌īŹļHĄ─┬Ęė╔ģfūh╣”─▄Ęų▓╝║═─ŻēK╗»įOėŗųąąĶę¬┐╝æ]▀@ą®ę“╦žĪŻ
ŻĄ.Ż▒.Ż┤ Ż─ŻęŻįŻ═
Ż╦Ż¼Ż╦ŻĶŻ’ŻßĄ╚╚╦ī”┬Ęė╔▒Ē╣▄└Ē▀Mąą┴╦Ęų▓╝╩ĮĪó─ŻēK╗»įOėŗŻ©Ż─ŻķŻ¾Ż¶Ż“ŻķŻŌŻ§Ż¶ŻÕŻõŻęŻįŻ═Ż¼║åĘQŻ─ŻęŻįŻ═Ż®Ż¼Ż─ŻęŻįŻ═ĘĮ░Ėīó┬Ęė╔▒Ē╣▄└ĒĘųĮŌ×ķŠĆ┐©┬Ęė╔▒Ē╣▄└Ē─ŻēKŻ©Ż╠Ż├-ŻęŻįŻ═Ż®║═╚½Šų┬Ęė╔▒Ē╣▄└Ē─ŻēKŻ©ŻŪ-ŻęŻįŻ═Ż®Ż¼Ż╠Ż├-ŻęŻįŻ═Ęų▓╝į┌ŠĆ┐©Ż¼ŠĆ┐©ŠSūo╦³╦∙į┌ģ^ė“Ą─µ£┬ĘĀŅæBöĄō■ÄņŻ¼«öČÓéĆŠĆ┐©Š▀ėąŽÓ═¼Ą─═žōõą┼ŽóĢrŻ¼▀@ą®ŠĆ┐©ĮM│╔ę╗éĆ╝»╚║Ż¼į┌╝»╚║ųą▀x┼e│¼╝ē╣سcžōž¤ėŗ╦Ńųž»Bģ^ė“Ą─┬Ęė╔▒ĒŻ¼ŻŪ-ŻęŻįŻ═Ęų▓╝į┌┐žųŲå╬į¬Ż¼ŻŪ-ŻęŻįŻ═─ŻēKĮė╩šĖ„Ż╠Ż├-ŻęŻįŻ═─ŻēK░l╦═Ą─┬Ęė╔ą┼ŽóūŅĮKėŗ╦Ń│÷╚½Šų┬Ęė╔▒ĒĪŻ
Ż─ŻęŻįŻ═ĘĮ░Ė│õĘų└¹ė├öĄō■ŲĮ├µĄ─ėŗ╦Ń║═┤µā”┘Yį┤üĒ╠ßĖ▀┬Ęė╔▒ĒĄ─ėŗ╦Ńą¦┬╩Ż¼Ą½─┐Ū░┬Ęė╔Ų„Ą─ŠĆ┐©▓╗Š▀éõ┬Ęė╔ėŗ╦Ń─▄┴”Ż¼ę“┤╦Ż¼įōĘĮ░Ė▓╗▀m║Žė┌│ŻęÄ┬Ęė╔Ų„Ż¼īŹ¼F┤·ār▒╚▌^Ė▀Ż¼┴Ē═ŌŻ¼╦³į┌ę╗┼_╝»ųą╩Į┐žųŲ┬Ęė╔Ų„Ą─┐žųŲå╬į¬┼c▐D░lå╬į¬ų«ķgīŹ¼F┬Ęė╔▒Ēėŗ╦ŃĄ─Ęų▓╝╩ĮŻ¼¤oĘ©▒▄├Ō┐žųŲå╬į¬╗“ŻŪ-ŻęŻįŻ═─ŻēKī¦ų┬Ą─å╬³c╩¦ą¦Ż¼ĮĄĄ═┴╦┐╔┐┐ąįĪŻ
ŻĄ.Ż▒.ŻĄ ąĪĮY
┬Ęė╔ģfūhĄ─Ęų▓╝╩Į║═─ŻēK╗»įOėŗĘĮ░Ė╚ń▒ĒŻ│╦∙╩ŠĪŻ

▒ĒŻ│ ┬Ęė╔ģfūh╣”─▄Ęų▓╝╩ĮįOėŗ
─┐Ū░┬Ęė╔ģfūh┤¾Č╝╝»ųąį┌ų„┐žųŲå╬į¬Ż¼ė░Ēæ┴╦┐╔┐┐ąįŻ¼▓╗─▄īŹ¼Fžō▌dĘųō·║═▓óąą╠Ä└ĒŻ¼Ż─Ż├Żąīó┬Ęė╔ģfūhą┼┴Ņ╣”─▄▀węŲĄĮ▐D░lå╬į¬Ż¼┼c╝»ųą╩Į┐žųŲŽÓ▒╚Ż¼į┌ę╗Č©│╠Č╚╔Ž╠ßĖ▀┴╦ŽĄĮyĄ─┐╔┐┐ąį║═▓óąą╠Ä└Ē─▄┴”Ż¼Ż═Ż├ŻąŻ┬║═Ż─Ż├ŻąŻ┴ī”¼Fėąģfūh╣”─▄▀MąąĘų▓╝╩Į─ŻēK╗»įOėŗŻ¼╠ßĖ▀┴╦▓óąąąįĪó┐╔┐┐ąį║═┐╔öUš╣ąįŻ¼Ż─ŻęŻįŻ═╗∙ė┌Ė▀Č╦┬Ęė╔Ų„Ą─ŠĆ┐©Š▀éõėŗ╦Ń─▄┴”įOėŗ┴╦┬Ęė╔▒ĒĘų▓╝╩Į╣▄└ĒĘĮ░ĖŻ¼ī”ŠĆ┐©Ą─ąį─▄ę¬Ū¾▌^Ė▀Ż¼ė╔ė┌╦³į┌═¼ę╗┬Ęė╔Ų„Ą─┐žųŲå╬į¬┼cŠĆ┐©ų«ķgīŹ¼FĘų▓╝╩Į┬Ęė╔▒Ē╣▄└ĒŻ¼ė░Ēæ┴╦ŽĄĮyĄ─┐╔┐┐ąįŻ¼Ą½╩ŪŻ¼└¹ė├▐D░lå╬į¬ėŗ╦Ń┬Ęė╔▌^║├ĄžĘųō·┴╦┐žųŲå╬į¬Ą─žō▌dŻ¼╠ßĖ▀┴╦┬Ęė╔Ų„Ą─▓óąą╠Ä└Ēąį─▄ĪŻ
ŻĄ.Ż▓ Ęų▓╝╩Į┬Ęė╔╦ŃĘ©
×ķ┴╦╠ßĖ▀┬Ęė╔ėŗ╦Ńąį─▄Ż¼æ¬įOėŗĘų▓╝╩Į┬Ęė╔╦ŃĘ©Ż¼│õĘų└¹ė├Ęų▓╝╩Į┐žųŲŲĮ├µČÓéĆ┐žųŲå╬į¬Ą─┘Yį┤Ż¼╠ßĖ▀┬Ęė╔ėŗ╦Ńąį─▄Ż¼─┐Ū░Ą─Ęų▓╝╩Į┬Ęė╔╦ŃĘ©ų„ę¬Ęų×ķŻ║Ż©Ż▒Ż®Ęų▓╝╩Į▓󹹯ŽŻėŻąŻŲ┬Ęė╔╦ŃĘ©Ż¼░³└©ŻąŻ─ŻėŻąŻįĪóŻ┬ŻąŻ┴║═ŻąŻęŻįŻ├Ż╗Ż©Ż▓Ż®Ęų▓╝╩Į▓󹹯┬ŻŪŻą┬Ęė╔╦ŃĘ©Ż¼ų„ę¬ėąŻŲŻ─Ż╚Żą║═Ż╔ŻįŻ┬ŻŪŻąĪŻ
ŻĄ.Ż▓.Ż▒ Ęų▓╝╩Į▓󹹯ŽŻėŻąŻŲ┬Ęė╔╦ŃĘ©
Ż©Ż▒Ż®ŻąŻ─ŻėŻąŻį
Ż┌ŻĶŻ§-Ż┘.Ż┬Ą╚╚╦Ė∙ō■ūŅČ╠┬ĘÅĮśõŻ©ŻėŻĶŻ’Ż“Ż¶ŻÕŻ¾Ż¶ŻąŻßŻ¶ŻĶŻįŻ“ŻÕŻÕŻ¼║åĘQŻėŻąŻįŻ®į÷┴┐Ė³ą┬Ą─╠ž³cŻ¼└¹ė├įŁėąĄ─ŻėŻąŻįśõįOėŗ┴╦▓óąąäėæBŻėŻąŻį╦ŃĘ©Ż©ŻąŻßŻ“ŻßŻņŻņŻÕŻņŻ─Ż∙ŻŅŻßŻĒŻķŻŃŻėŻąŻįŻ¼║åĘQŻąŻ─ŻėŻąŻįŻ®Ż¼├┐┤╬ŠWĮj═žōõ░l╔·ūā╗»Ż¼īóįŁŻėŻąŻįśõ╔Ž╩▄µ£┬Ęūā╗»ė░ĒæĄ─╣سc╝ė╚ļĻĀ┴ąŻ¼▓óĘų┼õĮoŽÓæ¬Ą─┐žųŲå╬į¬Ż¼├┐éĆ┐žųŲå╬į¬├┐┤╬Å─▒ŠĄž▀x│÷ŠÓļxį÷┴┐ūŅąĪĄ─╣سcŻ¼┐žųŲå╬į¬ų«ķg└¹ė├ÅV▓źĘĮ╩Į▀x│÷╚½ŠųŠÓļxį÷┴┐ūŅąĪĄ─╣سcŻ¼├┐┤╬▀x│÷╚½ŠųŠÓļxį÷┴┐ūŅąĪĄ─╣سc║¾Ż¼Ė∙ō■įŁŻėŻąŻįśõ╔ŽĄ─ĖĖūėĻPŽĄŻ¼ŽÓæ¬Ė³ą┬╚½ŠųūŅąĪ╣سcįŁŻėŻąŻįśõ╔ŽūėīOĄ─ŠÓļxŻ¼▓óīó╦³éāÅ─╩▄ė░Ēæ╣سcĄ─ĻĀ┴ąųąäh│²Ż¼╚╗║¾īóą┬╩▄ė░ĒæĄ─╣سc╝ė╚ļĻĀ┴ąŻ¼Ę┤Å═Ą³┤·Ż¼ų▒ĄĮ╩▄ė░Ēæ╣سcĄ─ĻĀ┴ą×ķ┐šĪŻ
ŻąŻ─ŻėŻąŻį╦ŃĘ©└¹ė├Ęų▓╝╩Į┐žųŲŲĮ├µČÓéĆ╠Ä└ĒŲ„┘Yį┤Ęųō·ėŗ╦Ńžō▌dŻ¼īŹ¼F┴╦ŻŽŻėŻąŻŲ┬Ęė╔▒ĒĄ─▓óąąėŗ╦ŃŻ¼ė╔ė┌└¹ė├┴╦ŻėŻąŻįį÷┴┐Ė³ą┬Ż¼£p╔┘┴╦š¹éĆ╦ŃĘ©Ą─Ą³┤·┤╬öĄŻ¼«öŠWĮj═žōõęÄ─Ż▒╚▌^┤¾Ż¼▓óŪęµ£┬Ę╣╩šŽī”įŁŻėŻąŻįśõ╔ŽĄ─╣سcė░Ēæ▒╚▌^ČÓĢrŻ¼▀@éĆ╦ŃĘ©Ą─▓óąąąį─▄▌^║├Ż¼«öŠWĮj═žōõųą├┐éĆ╩▄ė░Ēæ╣سcĄ─╚ļČ╚║═│÷Č╚▒╚▌^ĮėĮ³ĢrŻ¼┐žųŲå╬į¬Ą─žō▌d▒╚▌^Š∙║ŌŻ¼ė╔ė┌├┐┤╬Ą³┤·┐žųŲå╬į¬ķgąĶꬎÓ╗ź═©ą┼Ż¼ę“┤╦Ż¼┬Ęė╔Ų„ā╚▓┐═©ą┼ķ_õN▒╚▌^┤¾Ż¼╩▄ŠWĮj═žōõĮYśŗ║═Ą³┤·╦ŃĘ©Ą─ė░ĒæŻ¼ŽĄĮyĄ─žō▌dŠ∙║Ōąį▓ŅŻ¼ė░Ēæ┴╦▓óąąąį─▄ĪŻ
Ż©Ż▓Ż®ŻąŻėŻąŻį
Ż┌ŻĶŻßŻŅŻń-Żž.ŻąĄ╚╚╦ßśī”ŻŽŻėŻąŻŲģfūhįOėŗ┴╦▓󹹯ėŻąŻį╦ŃĘ©Ż©ŻąŻßŻ“ŻßŻņŻņŻÕŻņŻėŻąŻįŻ┴ŻņŻńŻ’Ż“ŻķŻ¶ŻĶŻĒŻ¼║åĘQŻąŻėŻąŻįŻ®Ż¼ŻąŻėŻąŻįĖ∙ō■┬Ęė╔Ų„ųą┐žųŲå╬į¬Ą─öĄ┴┐Ż└¹ė├łDĘųĖŅ└ĒšōīóŠWĮj═žōõĘųĖŅ│╔ÄūéĆģ^ė“Ż¼├┐éĆ┐žųŲå╬į¬žōž¤ŽÓæ¬ģ^ė“Ą─┬Ęė╔ėŗ╦ŃŻ¼╩ūŽ╚Ż¼├┐éĆ┐žųŲå╬į¬▓óąąėŗ╦Ń│÷Ė„ūįģ^ė“ā╚╦∙ėą▀ģĮń│╠Č╚╔Ž╠ßĖ▀┴╦ŽĄĮyĄ─┐╔┐┐ąį║═▓óąą╠Ä└Ē─▄┴”Ż¼Ż═Ż├ŻąŻ┬║═Ż─Ż├ŻąŻ┴ī”¼Fėąģfūh╣”─▄▀MąąĘų▓╝╩Į─ŻēK╗»įOėŗŻ¼╠ßĖ▀┴╦▓óąąąįĪó┐╔┐┐ąį║═┐╔öUš╣ąįŻ¼Ż─ŻęŻįŻ═╗∙ė┌Ė▀Č╦┬Ęė╔Ų„Ą─ŠĆ┐©Š▀éõėŗ╦Ń─▄┴”įOėŗ┴╦┬Ęė╔▒ĒĘų▓╝╩Į╣▄└ĒĘĮ░ĖŻ¼ī”ŠĆ┐©Ą─ąį─▄ę¬Ū¾▌^Ė▀Ż¼ė╔ė┌╦³į┌═¼ę╗┬Ęė╔Ų„Ą─┐žųŲå╬į¬┼cŠĆ┐©ų«ķgīŹ¼FĘų▓╝╩Į┬Ęė╔▒Ē╣▄└ĒŻ¼ė░Ēæ┴╦ŽĄĮyĄ─┐╔┐┐ąįŻ¼Ą½╩ŪŻ¼└¹ė├▐D░lå╬į¬ėŗ╦Ń┬Ęė╔▌^║├ĄžĘųō·┴╦┐žųŲå╬į¬Ą─žō▌dŻ¼╠ßĖ▀┴╦┬Ęė╔Ų„Ą─▓óąą╠Ä└Ēąį─▄ĪŻ
ŻĄ.Ż▓ Ęų▓╝╩Į┬Ęė╔╦ŃĘ©
×ķ┴╦╠ßĖ▀┬Ęė╔ėŗ╦Ńąį─▄Ż¼æ¬įOėŗĘų▓╝╩Į┬Ęė╔╦ŃĘ©Ż¼│õĘų└¹ė├Ęų▓╝╩Į┐žųŲŲĮ├µČÓéĆ┐žųŲå╬į¬Ą─┘Yį┤Ż¼╠ßĖ▀┬Ęė╔ėŗ╦Ńąį─▄Ż¼─┐Ū░Ą─Ęų▓╝╩Į┬Ęė╔╦ŃĘ©ų„ę¬Ęų×ķŻ║Ż©Ż▒Ż®Ęų▓╝╩Į▓󹹯ŽŻėŻąŻŲ┬Ęė╔╦ŃĘ©Ż¼░³└©ŻąŻ─ŻėŻąŻįĪóŻ┬ŻąŻ┴║═ŻąŻęŻįŻ├Ż╗Ż©Ż▓Ż®Ęų▓╝╩Į▓󹹯┬ŻŪŻą┬Ęė╔╦ŃĘ©Ż¼ų„ę¬ėąŻŲŻ─Ż╚Żą║═Ż╔ŻįŻ┬ŻŪŻąĪŻ
ŻĄ.Ż▓.Ż▒ Ęų▓╝╩Į▓󹹯ŽŻėŻąŻŲ┬Ęė╔╦ŃĘ©
Ż©Ż▒Ż®ŻąŻ─ŻėŻąŻį
Ż┌ŻĶŻ§-Ż┘Ż¼Ż┬Ą╚╚╦Ė∙ō■ūŅČ╠┬ĘÅĮśõŻ©ŻėŻĶŻ’Ż“Ż¶ŻÕŻ¾Ż¶ŻąŻßŻ¶ŻĶŻįŻ“ŻÕŻÕŻ¼║åĘQŻėŻąŻįŻ®į÷┴┐Ė³ą┬Ą─╠ž³cŻ¼└¹ė├įŁėąĄ─ŻėŻąŻįśõįOėŗ┴╦▓óąąäėæBŻėŻąŻį╦ŃĘ©Ż©ŻąŻßŻ“ŻßŻņŻņŻÕŻņŻ─Ż∙ŻŅŻßŻĒŻķŻŃŻėŻąŻįŻ¼║åĘQŻąŻ─ŻėŻąŻįŻ®Ż¼├┐┤╬ŠWĮj═žōõ░l╔·ūā╗»Ż¼īóįŁŻėŻąŻįśõ╔Ž╩▄µ£┬Ęūā╗»ė░ĒæĄ─╣سc╝ė╚ļĻĀ┴ąŻ¼▓óĘų┼õĮoŽÓæ¬Ą─┐žųŲå╬į¬Ż¼├┐éĆ┐žųŲå╬į¬├┐┤╬Å─▒ŠĄž▀x│÷ŠÓļxį÷┴┐ūŅąĪĄ─╣سcŻ¼┐žųŲå╬į¬ų«ķg└¹ė├ÅV▓źĘĮ╩Į▀x│÷╚½ŠųŠÓļxį÷┴┐ūŅąĪĄ─╣سcŻ¼├┐┤╬▀x│÷╚½ŠųŠÓļxį÷┴┐ūŅąĪĄ─╣سc║¾Ż¼Ė∙ō■įŁŻėŻąŻįśõ╔ŽĄ─ĖĖūėĻPŽĄŻ¼ŽÓæ¬Ė³ą┬╚½ŠųūŅąĪ╣سcįŁŻėŻąŻįśõ╔ŽūėīOĄ─ŠÓļxŻ¼▓óīó╦³éāÅ─╩▄ė░Ēæ╣سcĄ─ĻĀ┴ąųąäh│²Ż¼╚╗║¾īóą┬╩▄ė░ĒæĄ─╣سc╝ė╚ļĻĀ┴ąŻ¼Ę┤Å═Ą³┤·Ż¼ų▒ĄĮ╩▄ė░Ēæ╣سcĄ─ĻĀ┴ą×ķ┐šĪŻ
ŻąŻ─ŻėŻąŻį╦ŃĘ©└¹ė├Ęų▓╝╩Į┐žųŲŲĮ├µČÓéĆ╠Ä└ĒŲ„┘Yį┤Ęųō·ėŗ╦Ńžō▌dŻ¼īŹ¼F┴╦ŻŽŻėŻąŻŲ┬Ęė╔▒ĒĄ─▓óąąėŗ╦ŃŻ¼ė╔ė┌└¹ė├┴╦ŻėŻąŻįį÷┴┐Ė³ą┬Ż¼£p╔┘┴╦š¹éĆ╦ŃĘ©Ą─Ą³┤·┤╬öĄŻ¼«öŠWĮj═žōõęÄ─Ż▒╚▌^┤¾Ż¼▓óŪęµ£┬Ę╣╩šŽī”įŁŻėŻąŻįśõ╔ŽĄ─╣سcė░Ēæ▒╚▌^ČÓĢrŻ¼▀@éĆ╦ŃĘ©Ą─▓óąąąį─▄▌^║├Ż¼«öŠWĮj═žōõųą├┐éĆ╩▄ė░Ēæ╣سcĄ─╚ļČ╚║═│÷Č╚▒╚▌^ĮėĮ³ĢrŻ¼┐žųŲå╬į¬Ą─žō▌d▒╚▌^Š∙║ŌŻ¼ė╔ė┌├┐┤╬Ą³┤·┐žųŲå╬į¬ķgąĶꬎÓ╗ź═©ą┼Ż¼ę“┤╦Ż¼┬Ęė╔Ų„ā╚▓┐═©ą┼ķ_õN▒╚▌^┤¾Ż¼╩▄ŠWĮj═žōõĮYśŗ║═Ą³┤·╦ŃĘ©Ą─ė░ĒæŻ¼ŽĄĮyĄ─žō▌dŠ∙║Ōąį▓ŅŻ¼ė░Ēæ┴╦▓óąąąį─▄ĪŻ
Ż©Ż▓Ż®ŻąŻėŻąŻį
Ż┌ŻĶŻßŻŅŻń-ŻžŻ¼ŻąĄ╚╚╦ßśī”ŻŽŻėŻąŻŲģfūhįOėŗ┴╦▓󹹯ėŻąŻį╦ŃĘ©Ż©ŻąŻßŻ“ŻßŻņŻņŻÕŻņŻėŻąŻįŻ┴ŻņŻńŻ’Ż“ŻķŻ¶ŻĶŻĒŻ¼║åĘQŻąŻėŻąŻįŻ®Ż¼ŻąŻėŻąŻįĖ∙ō■┬Ęė╔Ų„ųą┐žųŲå╬į¬Ą─öĄ┴┐Ż└¹ė├łDĘųĖŅ└ĒšōīóŠWĮj═žōõĘųĖŅ│╔ÄūéĆģ^ė“Ż¼├┐éĆ┐žųŲå╬į¬žōž¤ŽÓæ¬ģ^ė“Ą─┬Ęė╔ėŗ╦ŃŻ¼╩ūŽ╚Ż¼├┐éĆ┐žųŲå╬į¬▓óąąėŗ╦Ń│÷Ė„ūįģ^ė“ā╚╦∙ėą▀ģĮń╣سcĄĮ▀@ą®ģ^ė“├┐éĆ╣سcĄ─ūŅČ╠┬ĘÅĮŻ¼ī”ė┌░³║¼Ė∙╣سcĄ─ģ^ė“Ż¼ėŗ╦ŃĖ∙╣سcĄĮ▀@ą®ģ^ė“ųą├┐éĆ╣سcĄ─ūŅČ╠┬ĘÅĮŻ¼╚╗║¾Ż¼īó├┐éĆģ^ė“Ą─▀ģĮń╣سc║═Ė∙╣سcĮM│╔ą┬Ą─═žōõłDŻ¼į┘ėŗ╦ŃĖ∙╣سcĄĮ▀@éĆģ^ė“▀ģĮń╣سcĄ─ūŅČ╠┬ĘÅĮŻ╗ūŅ║¾▓󹹥žīóĖ∙╣سcĄĮ├┐éĆģ^ė“▀ģĮń╣سcĄ─┬ĘÅĮ║═ģ^ė“▀ģĮń╣سcĄĮģ^ė“ā╚├┐éĆ╣سcĄ─ūŅČ╠┬ĘÅĮ║Ž▓óŻ¼╔·│╔ūŅĮKĄ─ŻėŻąŻįśõĪŻ
├┐┤╬═žōõūā╗»Ż¼ŻąŻėŻąŻį╦ŃĘ©ąĶę¬ųžą┬ĘųĖŅŠWĮj═žōõŻ¼╦ŃĘ©Å═ļsČ╚Ė▀Ż¼ę“┤╦Ż¼ŻąŻėŻąŻį╦ŃĘ©▓╗▀mė├ė┌ŠWĮj═žōõŅlĘ▒ūā╗»ĢrĄ─ŻėŻąŻįėŗ╦ŃŻ¼╗∙ė┌łDĘųĖŅ─▄ē“▌^║├ĄžīŹ¼Fžō▌dŠ∙║ŌŻ¼▓óąąąį─▄▌^║├Ż¼ŻąŻėŻąŻį╦ŃĘ©į┌ŠWĮj═žōõęÄ─Ż▒╚▌^┤¾Ģr─▄ē“½@Ą├▌^║├Ą─ąį─▄ĪŻ
Ż©Ż│Ż®ŻąŻęŻįŻ├
ŻžŻķŻßŻ’-ŻžŻ¼ŻąĄ╚╚╦Ė∙ō■╝»╚║┬Ęė╔Ų„Ą─Ęų▓╝╩Į┐žųŲŲĮ├µ╠ß│÷┴╦▓󹹯ŽŻėŻąŻŲ┬Ęė╔╦ŃĘ©Ż©ŻąŻßŻ“ŻßŻņŻņŻÕŻņŻęŻ’Ż§Ż¶ŻķŻŅŻńŻįŻßŻŌŻņŻÕŻ├Ż’ŻĒ¬▓ŻŻ§Ż¶ŻßŻ¶ŻķŻ’ŻŅŻ¼║åĘQŻąŻęŻįŻ├Ż®Ż¼└¹ė├╝»╚║┬Ęė╔Ų„ČÓéĆ┬Ęė╔╣سcīóŻŽŻėŻąŻŲģ^ė“░┤šš╩š╝»Ą─═žōõą┼Žó▀MąąĘųĖŅŻ¼├┐éĆ╣سcžōž¤ŠSūoūį╝║╦∙į┌ģ^ė“Ą─═žōõŻ¼Ė„ūįėŗ╦Ń▀@éĆģ^ė“Ą─┬Ęė╔▒ĒŻ¼«öČÓéĆ┬Ęė╔╣سcĄ─┬Ęė╔ģ^ė“ųž»BĢrŻ¼▀x┼eųĖ┼╔╣سcėŗ╦Ńųž»Bģ^ė“Ą─┬Ęė╔▒ĒŻ¼├┐éĆģ^ė“Ą─ųĖ┼╔╣سcŽ“╦∙ėą╣سc═©Ėµūį╝║Ą─┬Ęė╔▒ĒŻ¼├┐éĆ╣سc▀xō±ąįĄžīóĮė╩šĄ─┬Ęė╔║Ž▓ó╔·│╔ūŅĮKĄ─┬Ęė╔▒ĒŻ¼«öūį╝║╦∙į┌ģ^ė“Ą─┬Ęė╔ūā╗»Ż¼├┐éĆųĖ┼╔┬Ęė╔╣سcŽ“Ųõ╦³┬Ęė╔╣سcÅV▓źūā╗»Ą─┬Ęė╔ĪŻ
ŻąŻęŻįŻ├╦ŃĘ©┐╔īŹ¼FŻŽŻėŻąŻŲ┬Ęė╔▒ĒĄ─▓óąąėŗ╦ŃŻ¼Ą½╦³ī”ŠWĮj═žōõę└┘ć▒╚▌^┤¾Ż¼ė╔ė┌├┐éĆ╣سcį┌ŠWĮjųą╦∙╠ÄĄ─╬╗ų├▓╗═¼Ż¼╦³éāĖ„ūįĄ─ėŗ╦Ńžō▌d▓╗═¼Ż¼▓╗─▄║▄║├ĄžīŹ¼F╣سcķgĄ─žō▌dŠ∙║ŌŻ¼▓óąąąį▌^Ą═Ż¼├┐éĆ╣سc▓╗ŠSūo╚½ŠųĄ─µ£┬ĘĀŅæBöĄō■ÄņŻ¼ę╗Č©│╠Č╚╔ŽĮĄĄ═┴╦┐╔┐┐ąįĪŻ
ŻĄ.Ż▓.Ż▓ Ęų▓╝╩Į▓󹹯┬ŻŪŻą┬Ęė╔╦ŃĘ©
Ż©Ż▒Ż®ŻŲŻ─Ż╚Żą
Ż┌ŻĶŻßŻŅŻń-ŻžŻ¼Ż┌ŻĶĄ╚╚╦įOėŗ┴╦Ż┬ŻŪŻą▓óąą┬Ęė╔╦ŃĘ©Ż©ŻŲŻ§ŻņŻņŻ─ŻķŻ¾Ż¶Ż“ŻķŻŌŻ§Ż¶ŻÕŻõŻ╚ŻķŻńŻĶŻąŻßŻ“ŻßŻņŻņŻÕŻņŻķŻ·ŻÕŻõŻ┬ŻŪŻąŻ¼║åĘQŻŲŻ─Ż╚ŻąŻ®Ż¼╝»╚║┬Ęė╔Ų„Ą─├┐éĆ┬Ęė╔╣سcĘųäe│õ«ö┼c╦³ŽÓ▀BĄ─Ż┬ŻŪŻąÓÅŠėĄ─┤·└ĒŻ¼žōž¤┼cŲõŽÓ▀BĄ─Ż┬ŻŪŻąÓÅŠėĮ╗ōQ┬Ęė╔ą┼ŽóŻ¼├┐éĆ╣سcĖ∙ō■▒ŠĄž┬Ęė╔ą┼Žóėŗ╦Ń▒ŠĄžūŅā×┬Ęė╔Ż¼├┐éĆ╣سcīó▒ŠĄžūŅā×┬Ęė╔ÅV▓źĮo╝»╚║ųąŲõ╦³╣سcŻ¼Å─Č°▒ŻūC├┐éĆ┬Ęė╔╣سcČ╝ŠSūoę╗ų┬Ą─╚½Šų┬Ęė╔▒ĒŻ¼«ö╝»╚║ųą─│éĆ╣سc╩¦ą¦ĢrŻ¼īó╦³┤·└ĒĄ─Ż┬ŻŪŻąÓÅŠėĢ■įÆ║═┬Ęė╔ėŗ╦Ń╚╬äšųžą┬Ęų┼õĮoŲõ╦³╣سcĪŻ
ŻŲŻ─Ż╚ŻąĘĮ░Ėėąą¦Ąž└¹ė├┴╦╝»╚║ā╚▓┐Ė„éĆ┬Ęė╔╣سcĄ─ėŗ╦Ń┘Yį┤║═┤µā”┘Yį┤Ż¼├┐éĆ┬Ęė╔╣سcų╗ėŗ╦Ń║═┤µā”ę╗▓┐ĘųŻ┬ŻŪŻą║“▀x┬Ęė╔Ż¼ČÓéĆ┬Ęė╔╣سcĘųō·žō▌d╠ßĖ▀┴╦┬Ęė╔ėŗ╦Ńąį─▄Ż¼Ą½╣سcķgęįÅV▓źĄ─ĘĮ╩Į═¼▓Į┬Ęė╔ą┼Žóį÷╝ė┴╦ā╚▓┐Ą─═©ą┼ķ_õNĪŻ
Ż©Ż▓Ż®Ż╔ŻįŻ┬ŻŪŻą
ŻūŻ§-Ż╦Ż§ŻŅĄ╚╚╦įOėŗ┴╦“Ą³┤·śõ”Ż┬ŻŪŻą▓óąą┬Ęė╔╦ŃĘ©Ż©Ż╔Ż¶ŻÕŻ“ŻßŻ¶ŻķŻ÷ŻÕŻįŻ“ŻÕŻÕŻ┬ŻŪŻąŻ¼Ż╔ŻįŻ┬ŻŪŻąŻ®Ż¼Ż╔ŻįŻ┬ŻŪŻąĘĮ░ĖĖ∙ō■Ż┬ŻŪŻąÓÅŠėĄ─öĄ┴┐ŻŅ║═├┐éĆ┐žųŲå╬į¬Ą─Ż┬ŻŪŻąÓÅŠėöĄ┴┐Ż¼▓╔ė├ÅVČ╚ā׎╚╦ŃĘ©śŗĮ©ę╗┐├ŻļļAĄ³┤·śõŻ¼├┐«ö┬Ęė╔░l╔·ūā╗»Ż¼śõųąŽÓæ¬Ą─╚~ūė╣سc╩ūŽ╚ėŗ╦Ń│÷▒ŠĄžūŅā×┬Ęė╔Ż¼╚╗║¾░l╦═Įoūį╝║Ą─ĖĖ╣سcŻ¼▀@śėčžų°╚~ūėŽ“Ė∙Ą─ĘĮŽ“Ę┤Å═Ą³┤·Ż¼ūŅ║¾į┌Ė∙╣سcėŗ╦Ń│÷╚½ŠųūŅā×┬Ęė╔ĪŻ
«öžō▌dĘų▓╝▒╚▌^Š∙║ŌĢrŻ¼Ż╔ŻįŻ┬ŻŪŻą╦ŃĘ©Ą─ąį─▄ūŅāׯ¼«öžō▌dĘų▓╝▓╗Š∙║ŌĢrŻ¼└²╚ńŻ¼ĄĮ─│ę╗─┐Ą─ĄžĄ─┬Ęė╔ų╗┤µā”į┌ę╗éĆā╚▓┐╣سcĢrŻ¼╗∙ė┌śõą╬ĮYśŗąĶę¬Å─╚~ūėĄĮĖ∙Ą─ĘĮŽ“ČÓ┤╬Ą³┤·ėŗ╦ŃŻ¼ĮĄĄ═┴╦┬Ęė╔ėŗ╦Ńą¦┬╩ĪŻ
ŻĄ.Ż▓.Ż│ ąĪĮY
ŻąŻ─ŻėŻąŻįīóėŗ╦ŃŻėŻąŻįśõ▓Į¾Eųąėŗ╦ŃÓÅŠė╣سcĄ─ŠÓļx║═╦č╦„╚½ŠųŠÓļxūŅąĪ╣سcīŹ¼F┴╦▓óąą╠Ä└ĒŻ¼Ą½╦ŃĘ©Å═ļsČ╚▌^Ė▀Ż¼▓╗─▄īŹ¼F▌^║├Ą─žō▌dŠ∙║ŌŻ¼ŻąŻėŻąŻįīó═žōõ▀MąąĘųĖŅŻ¼─▄ē“▌^║├īŹ¼F┬Ęė╔ėŗ╦ŃĄ─▓óąą║═žō▌dŠ∙║ŌŻ¼Ą½╦ŃĘ©Å═ļsČ╚▌^Ė▀Ż¼ŻąŻęŻįŻ├ī”ŠWĮj═žōõ▀MąąĘųĖŅŻ¼╦ŃĘ©ąį─▄╩▄ŠWĮj═žōõĮYśŗė░Ēæ▒╚▌^┤¾Ż¼žō▌dŠ∙║Ōąį─▄▓ŅŻ¼Ą½╦ŃĘ©Å═ļsČ╚Ą═ĪŻ
ŻŲŻ─Ż╚Żą░┤ÓÅŠėĢ■įÆīóŻ┬ŻŪŻą┬Ęė╔ėŗ╦Ń╚╬äš▀MąąäØĘųŻ¼─▄ē“▌^║├ĄžīŹ¼FŻ┬ŻŪŻą┬Ęė╔ėŗ╦Ń▓󹹯¼╦ŃĘ©Å═ļsČ╚Ą═Ż¼▓╔ė├ÅV▓źĄ─ĘĮ╩Į▀Mąą┬Ęė╔ą┼Žó═¼▓ĮŻ¼£p╔┘┴╦┬Ęė╔ėŗ╦ŃĄ─Ą³┤·┤╬öĄŻ¼ČÓéĆ╣سc▓óąąėŗ╦ŃŻ¼╠ßĖ▀┴╦ŽĄĮyĄ─▓óąąąį─▄Ż¼Ą½╩ŪŻ¼į┌╗ź┬ōŠWųąŻ¼ė╔ė┌ČÓéĆÓÅŠėĢ■═©Ėµ═¼ę╗╣╩šŽŻ¼╗∙ė┌ÅV▓źĄ─ĘĮ╩Į▀Mąą┬Ęė╔ą┼Žó═¼▓Įīóī¦ų┬ā╚▓┐┤¾┴┐Ą─═©ą┼ķ_õNŻ¼Ż╔ŻįŻ┬ŻŪŻąļm╚╗░┤ÓÅŠėĢ■įÆäØĘųžō▌d▓óąąėŗ╦ŃŻ┬ŻŪŻą┬Ęė╔Ż¼Ą½ąĶę¬Įø▀^ČÓ┤╬Ą³┤·▓┼─▄ėŗ╦Ń│÷╚½ŠųūŅā×┬Ęė╔Ż¼ļSų°śõĖ▀Č╚į÷╝ėŻ¼ā╚▓┐═©ą┼ķ_õN║═čėĢr▓╗öÓį÷┤¾Ż¼ė░Ēæ┴╦ŽĄĮyĄ─▓óąąąį─▄ĪŻ
ŻČ ĮYšō║═蹊┐š╣═¹
┬Ęė╔Ų„┐žųŲŲĮ├µĄ─Ęų▓╝╩ĮīŹ¼F╩Ūę╗ĘN░lš╣┌ģä▌Ż¼ę▓╩Ū┬Ęė╔Ų„¾wŽĄĮYśŗ╝░▄ø╝■įOėŗ▒žĒÜĮŌøQĄ─ę╗éĆĻPµIąį╝╝ągå¢Ņ}Ż¼═©▀^ęį╔ŽĘų╬÷║═▒╚▌^Ż¼▒Š╬─šJ×ķīŹ¼FĘų▓╝╩Į┐žųŲŲĮ├µæ¬įōÅ─ęįŽ┬ÄūéĆĘĮ├µ╚ļ╩ųŻ║
Ż©Ż▒Ż®Ęų▓╝╩Į┐žųŲŲĮ├µ¾wŽĄĮYśŗ╩ŪīŹ¼F┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲĄ─╗∙ĄAŻ¼╦³×ķś╦£╩╗»Įė┐┌║═ā╚▓┐═©ą┼įOėŗ╠ß╣®ę└ō■Ż¼×ķ┐žųŲŲĮ├µąį─▄║═╣”─▄Ą─ņ`╗ŅöUš╣╠ß╣®ų¦│ųĪŻ
Ż©Ż▓Ż®ś╦£╩╗»Įė┐┌║══©ą┼ÖCųŲ╩ŪīŹ¼F┼c╗ź▀B╝╝ąg¤oĻPĄ─ĻPµI╝╝ągŻ¼╩Ū┐žųŲå╬į¬┼c▐D░lå╬į¬öĄ┴┐║═╣”─▄ņ`╗ŅöUš╣Ą─╗∙▒Š▒ŻūCĪŻ
Ż©Ż│Ż®▄ø╝■Ęų▓╝╩ĮĪó─ŻēK╗»įOėŗ╩Ū╠ßĖ▀┬Ęė╔Ų„ąį─▄Ż¼ų¦│ų┬Ęė╔Ų„╣”─▄║═ąį─▄äėæBöUš╣Ą─ų„ę¬═ŠÅĮŻ¼║Ž└ĒįOėŗīóėą└¹ė┌╠ßĖ▀┬Ęė╔Ų„Ą─┐╔ė├ąį║═┐╔öUš╣ąįĪŻ
ļm╚╗─┐Ū░╠ß│÷┴╦ę╗ą®┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲĘĮ░ĖŻ¼Ą½╩Ū┬Ęė╔Ų„īŹ¼FĘų▓╝╩Į┐žųŲ╚į╚╗├µ┼Rę╗ą®ĻPµIå¢Ņ}žĮ┤²ĮŌøQŻ¼ąĶę¬▀Mę╗▓Į╔Ņ╚ļ蹊┐Ż║Ż©Ż▒Ż®╚╬äšĘų┼õŻ¼╚ń║╬īóįŁüĒ▓óąą▀\ąąį┌ę╗éĆ┐žųŲå╬į¬╔ŽĄ─ČÓéĆ┬Ęė╔ģfūh╚╬äš║Ž└ĒĄžĘų▓╝ĄĮČÓéĆĘų▓╝╩ĮĄ─┐žųŲå╬į¬Ż¼▀@ąĶę¬čąŠ┐Ęų▓╝╩Į┐žųŲŲĮ├µĄ─╚╬äšĘų┼õĘĮ░ĖŻ¼╝┤ę¬┐╝æ]├┐éĆ╚╬äšī”Ż├ŻąŻšĄ─š╝ė├ĢrķgŻ¼ėųę¬┐╝æ]▓╗═¼┬Ęė╔ģfūh─ŻēKų«ķgĄ─═©ą┼ķ_õNŻ¼īŹ¼Fžō▌dŠ∙║ŌŻ¼╩╣ā╚▓┐═©ą┼ķ_õNūŅąĪŻ¼Å─Č°ā×╗»š¹éĆŽĄĮyĄ─ąį─▄Ż¼Ż©Ż▓Ż®Ęų▓╝╩Į┬Ęė╔╦ŃĘ©Ż¼æ¬įOėŗĖ▀ą¦Ą─Ęų▓╝╩Į┬Ęė╔╦ŃĘ©Ż¼│õĘų└¹ė├Ė„éĆ╣سcĄ─ėŗ╦Ń║═┤µā”┘Yį┤Ż¼╠ßĖ▀ŽĄĮyĄ─ąį─▄ĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║┬Ęė╔Ų„Ęų▓╝╩Į┐žųŲ蹊┐ŠC╩÷
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/support/1112159113.html