1 ę²čį
ļSų°Ų¹▄ć╣żśIĄ─░lš╣Ż¼│╦ė├▄ćąą±é╦┘Č╚įĮüĒįĮĖ▀Ż¼ąą±é▀^│╠ųą▄ć▌åČ©╬╗ģóöĄūā╗»ī”▄ć▌v╩µ▀mąį╝░▓┘┐vĘĆČ©ąįĄ─ė░Ēæę▓įĮüĒįĮ┤¾Ż¼╦∙ęį│╦ė├▄ćĄ─K&C╠žąįįOėŗęčĮø│╔×ķć°ā╚═ŌŲ¹▄ćįOėŗķ_░l▀^│╠ųąę╗ĒŚųžę¬Ą─ā╚╚▌Ż¼▓óū„×ķę╗ĒŚųžę¬Ą─ŽĄĮyüĒŅA£yī”š¹▄ć▓┘┐vĘĆČ©ąį─▄Š▀ėąĄ─ų▒Įėė░ĒæĪŻ╠ōöMśėÖC╝╝ągĄ─░lš╣Ż¼┐╔ęįį┌▄ć▌v╬’└Ēśė▄ć╔·«aų«Ū░└¹ė├CAE─Żą═ī”▄ć▌vĄ─ąį─▄▀Mąąķ_░lįOėŗŻ¼╚╗║¾į┘═©▀^╬’└Ēśė▄ćī”CAE─Żą═▀MąąąŻš²Ż¼īŹ¼FCAE─Żą═┼cīŹ▄ćąį─▄Ą─ę╗ų┬ąįŻ¼×ķęį║¾«aŲĘķ_░l╠ß╣®ų¦│ųĪŻ
╚ń║╬į┌Č╠Ģrķgā╚šę│÷ė░Ēææę╝▄K&C╠žąįģóöĄĄ─ūā┴┐Ż¼▓ó╝ėęįš{š¹Ė─▀MŻ¼▀@╩ŪĄž▒Pčą░lš{Į╠╚╦åTŲ╚ŪąąĶę¬ĮŌøQĄ─å¢Ņ}ĪŻ▒Š╬─╩Ū└¹ė├ā×╗»╣żŠ▀ADAMS/lnsight─ŻēK▀Mąąņ`├¶Č╚Ęų╬÷Ż¼┤_Č©ė▓³cū°ś╦┼cæę╝▄K&C╠žąįĄ─K╠žąįų«ķgĄ─ĻPŽĄŻ¼▓óßśī”ė▓³c▀Mąąā×╗»Ż¼╠ß│÷Ė─▀MĘĮ░ĖŻ¼╩╣CAE─Żą═K&C╠žąįĘ┬šµųĄĮėĮ³─┐ś╦╠žąįŻ¼╝┤īŹ▄ćæę╝▄K&C╠žąįįć“×ųĄĪŻ
2 ņ`├¶Č╚Ęų╬÷Ė┼╩÷╝░ADAMS/lnsightĮķĮB
2.1ņ`├¶Č╚Ęų╬÷Ė┼╩÷
ŽĄĮyĄ─äėæBąį─▄╩▄ģóöĄūā«Éė░ĒæĄ─ī┘ąįĘQ×ķŽĄĮyĄ─ņ`├¶Č╚ĪŻę╗░ŃųĖŽĄĮyĄ─ģóöĄņ`├¶Č╚Ż¼╝┤ŽĄĮyĄ─ģóöĄņ`├¶Č╚╩ŪŽĄĮyĄ─ģóöĄūā╗»ī”ŽĄĮyäėæBąį─▄Ą─ė░ĒæŻ¼ę▓╝┤ģóöĄūā╗»ī”ųT╚ńŽĄĮyĄ─ĢrķgĒææ¬ĪóĀŅæBŽ“┴┐Īóé„▀f║»öĄ╗“Ųõ╦³ŽĄĮyäėæBąį─▄Ą─ė░ĒæĪŻ«öŽĄĮyĄ─ģóöĄūā╗»ĢrŻ¼ÖCąĄŽĄĮyĄ─ņ`├¶Č╚╩ŪĘų╬÷įōŽĄĮyĄ─ę╗éĆ╗∙▒Šå¢Ņ}ĪŻĻPė┌ģóöĄūā╗»╚ń║╬ė░ĒæŽĄĮyĄ─ąį─▄Ż¼ī”ė┌ŽĄĮyĄ─Ė─▀MįOėŗėąų°ųžę¬Ą─ęŌ┴xĪŻ
2.2ADAMS/InsightĮķĮB
Adams/lnsight╩Ū╗∙ė┌ŠWĒō╝╝ągĄ─ą┬─ŻēKĪŻ└¹ė├įō─ŻēKŻ¼┐╔ęįīóĘ┬šµĮY╣¹ų├ė┌InternetŠWĒō╔ŽŻ¼Ų¾śI▓╗═¼Ą─▓┐ķT╚╦åTŻ©įOėŗ╣ż│╠ĤĪóįć“×╣ż│╠ĤĪóėŗäØŻ»▓╔┘ÅŻ»╣▄└ĒŻ»õN╩█▓┐ķT╚╦åTŻ®Č╝┐╔ęį╣▓ŽĒĘų╬÷│╔╣¹Ż¼╝ė╦┘øQ▓▀▀M│╠Ż¼ūŅ┤¾│╠Č╚Ąž£pąĪøQ▓▀Ą─’LļUĪŻ
Adams/lnsight▓╔ė├Ą─įOėŗĘĮ░Ė░³└©╚½ģóöĄĘ©Īó▓┐ĘųģóöĄĘ©Īóī”ĮŪŠĆĘ©ĪóPlackett-BurmanĘ©Ż¼Box-BehnknĘ©║═D-OptimalĘ©Ż¼«ö▓╔ė├Ųõ╦¹▄ø╝■įOėŗÖCąĄŽĄĮyĢrŻ¼╣ż│╠Ĥ┐╔ęįų▒Įė▌ö╚ļ╗“═©▀^╬─╝■▌ö╚ļŽĄĮyŠžĻćī”įOėŗĘĮ░Ė▀MąąīŹ“×įOėŗŻ╗┐╔ęį═©▀^Æ▀├ĶūRäeĒæ欎ĄĮyąį─▄Ą─ņ`├¶ģóöĄ╗“ģóöĄĮM║ŽŻ╗┐╔ęį▓╔ė├Ēææ¬├µĘ©(response surface methods)═©▀^ī”įć“×öĄō■▀MąąöĄīW╗žÜwĘų╬÷Ż╗īŹ“×ĮY╣¹▓╔ė├╣ż│╠å╬╬╗ųŲŻ¼┐╔ęįĘĮ▒ŃĄž▌ö╚ļŲõ╦¹įć“×ĮY╣¹▀Mąą╣ż│╠Ęų╬÷Ż╗═©▀^ŠWĒō╝╝ąg┐╔ęįīóĘ┬šµĮY╣¹═©▀^ŠWĒō▀MąąĮ╗┴„Ż¼▒Ńė┌Ų¾śIĖ„éĆ▓┐ķTįuār║═š{š¹ÖCąĄŽĄĮyĄ─ąį─▄ĪŻ
3 CHC011ś╦ŚU▄ćŪ░æę╝▄▀\äėīWņ`├¶Č╚Ęų╬÷╝░ā×╗»
Ž┬╬─łDųąŻ¼╝t╔½īŹŠĆ×ķK&Cįć“×öĄō■Ż¼╦{╔½īŹŠĆ×ķ╬┤ā×╗»Ą─ļpÖM▒█æę╝▄Ę┬šµĘų╬÷Ą├│÷Ż¼║┌╔½╠ōŠĆ×ķā×╗»ė▓³cū°ś╦║¾Ą─ļpÖM▒█æę╝▄Ę┬šµĘų╬÷Ą├ĄĮĪŻī”▒╚蹊┐Ą─ĮY╣¹▒Ē├„Ż¼ā×╗»║¾Ą─ąį─▄ģóöĄ┤¾┤¾ā×ė┌ā×╗»Ū░Ą─ĪŻ
3.1CHCO11ś╦ŚU▄ćŪ░æę╝▄─Żą═Ą─Į©┴ó
CHC011ś╦ŚU▄ćŪ░æę╝▄×ķļpÖM▒█╩Į¬Ü┴óæę╝▄Ż¼ęįė▓³c×ķ╗∙ĄAäōĮ©Äū║╬─Żą═Ż¼Č©┴xĖ„┴Ń╝■ķgĄ─▀\äėĻPŽĄŻ¼┤_Č©╝s╩°ŅÉą═īóĖ„┴Ń╝■▀BĮėŲüĒŻ¼▌ö╚ļ─Żą═ģóöĄŻ©░³└©ÅŚąįį¬╝■╠žąįĪó╦─▌åČ©╬╗ģóöĄĪó▐DŽ“ŽĄĮyģóöĄĄ╚Ż®Ż¼═Ļ│╔ļpÖM▒█╩Į¬Ü┴óæę╝▄ŽĄĮyĘ┬šµĘų╬÷─Żą═Ż¼╚ńłD1╦∙╩ŠĪŻ

łD1 CHCO11ś╦ŚU▄ćŪ░æę╝▄ŽĄĮyĘ┬šµĘų╬÷─Żą═
3.2Ę┬šµöĄō■┼cįć“×öĄō■ī”▒╚
ī”Ū░æę╝▄Ę┬šµĘų╬÷─Żą═▀Mąą═¼Ž“ŲĮąą▌å╠°äėĘ┬šµŻ¼įOų├æę╝▄╔ŽŽ┬╠°äėŠÓļx×ķ60mmŻ¼Ą├ĄĮŪ░╩°ĮŪ║══ŌāAĮŪļS▌å╠°ūā╗»Ą─Ū·ŠĆŻ¼╚ńłD2ĪółD3ĪŻ
łD2 Ū░æę╝▄Ū░╩°ĮŪūā╗»Ū·ŠĆ
łD3 Ū░æę╝▄═ŌāAĮŪūā╗»Ū·ŠĆ
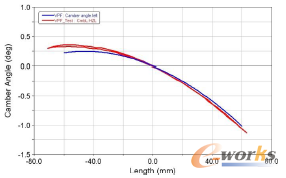
ī”Ū░æę╝▄Ę┬šµĘų╬÷─Żą═▀MąąĘ┤Ž“ŲĮąą▌å╠°äėĘ┬šµŻ¼įOų├æę╝▄╔ŽŽ┬╠°äėŠÓļx×ķ60mmŻ¼Ą├ĄĮŪ░╩°ĮŪ║══ŌāAĮŪļS▄ć╔Ēé╚āAĮŪūā╗»Ą─Ū·ŠĆŻ¼╚ńłD4ĪółD5ĪŻ
łD4 Ū░æę╝▄Ū░╩°ĮŪūā╗»Ū·ŠĆ
łD5 Ū░æę╝▄═ŌāAĮŪūā╗»Ū·ŠĆ
Å─Ū·ŠĆ┐╔ęį┐┤│÷CHC011Ū░ļpÖM▒█æę╝▄Ę┬šµŪ·ŠĆ┼cK&CöĄō■Ū·ŠĆėąę╗Č©Ų½▓ŅŻ¼×ķ┴╦š¹▄ć─Żą═Ę┬šµöĄō■┼cš¹▄ć▓┘ĘĆįć“ץ─ī”▒╚Ż¼─Żą═ąĶę¬▀Mąąā×╗»ĪŻ
3.3ņ`├¶Č╚Ęų╬÷
ī”CHCO11ś╦ŚU▄ćŪ░ļpÖM▒█╩Į¬Ü┴óæę╝▄▀MąąĘų╬÷Ż¼Å─įć“×║═īŹļHĮø“×┐╔ęįĄ├│÷Ż¼ų╗ėąUca_frontŻ¼Uca_outerŻ¼Uca_rearŻ¼Tierod_innerŻ¼Tierod_outerŻ¼Lca_frontŻ¼Lca_outerŻ¼Lca_rearŻ¼░╦³cī”æę╝▄╠žąįģóöĄėą▌^┤¾Ą─ė░ĒæŻ¼ŲõėÓė▓³cī”æę╝▄╠žąįģóöĄ╗∙▒Šė░Ēæ▓╗┤¾ĪŻę“┤╦įOėŗįć“ׯ¼░╦éĆ³cī”æ¬xŻ¼yŻ¼Z=éĆū°ś╦Ż¼╣▓24éĆūā┴┐ĪŻė▓³cģóöĄĄ─ā×╗»ų╗─▄į┌ąĪĘČć·ā╚▀MąąŻ¼▒Š╬─ųą├┐éĆįOėŗ³cĄ─ö_äėĘČć·į┌-3mmų┴3mmų«ķgŻ¼╝┤Ė„ė▓³cĄ─ā×╗»─┐ś╦ģ^ķg×ķ-3mmų┴3mmĪŻ
į┌Adams/lnsightųąĘųĮM▀MąąīŹ“×įOėŗŻ¼▀@śė═©▀^║Y▀xįć“׊═┐╔ęįīóūŅņ`├¶Ą─ģóöĄšę│÷Ż¼Ž┬├µ╩ŪĖ„Ēææ¬Ą─ė░Ēæę“╦žĄ─ņ`├¶ąįĘų╬÷ĮY╣¹ĪŻ
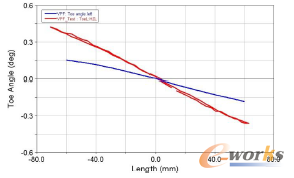
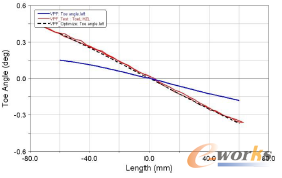
ŲĮąą╠°ĢrToeĄ─ų„ę¬ė░Ēæę“╦žĄ─ņ`├¶Č╚ĮY╣¹ęŖłD6Ż║
łD6 ŲĮąą╠°Toeņ`├¶Č╚ĮY╣¹
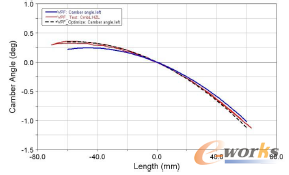
ŲĮąą╠°ĢrCamberĄ─ų„ę¬ė░Ēæę“╦žĄ─ņ`├¶Č╚ĮY╣¹ęŖłD7Ż║

łD7 ŲĮąą╠°Camberņ`├¶Č╚ĮY╣¹
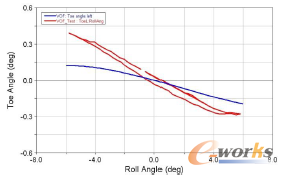
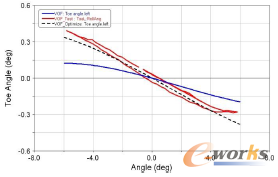
Ę┤Ž“╠°ĢrToeĄ─ų„ę¬ė░Ēæę“╦žĄ─ņ`├¶Č╚ĮY╣¹ęŖłD8Ż║
łD8 Ę┤Ž“╠°Toeņ`├¶Č╚ĮY╣¹
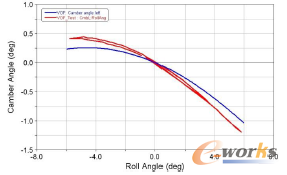
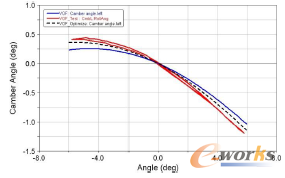
Ę┤Ž“╠°ĢrCamberĄ─ų„ę¬ė░Ēæę“╦žĄ─ņ`├¶Č╚ĮY╣¹ęŖłD9Ż║
łD9 Ę┤Ž“╠°Camberņ`├¶Č╚ĮY╣¹
Å─╔Ž├µų„ę¬ė░Ēæę“╦žĄ─ņ`├¶Č╚ĮY╣¹ųąŻ¼ęįė░ĒæÄūéĆĒææ¬Ą─╣▓═¼ę“╦ž║═ė░Ēæ─│éĆĒææ¬Ą½▓╗ė░ĒæŲõ╦¹Ēææ¬Ą─ę“╦ž×ķ─┐Ą─Ż¼š¹└Ē│÷▒Ē1Īó▒Ē2ĪŻ

▒Ē1 ŲĮąą╠°Ģræę╝▄▀\äėīWė░Ēæę“╦ž▒Ē

▒Ē2 Ę┤Ž“╠°Ģræę╝▄▀\äėīWė░Ēæę“╦ž▒Ē
Å─▒Ē1║═▒Ē2ųą┐╔ęį║å▒ŃĄ─š¹└Ē│÷═¼Ž“╠°äė║═Ę┤Ž“╠°äėĢrė░Ēææę╝▄▀\äėīWģóöĄĄ─╣▓═¼ę“╦žŻ¼╚ń▒Ē3ĪŻ
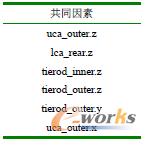
▒Ē3 ╣▓═¼ę“╦ž
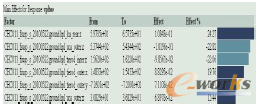
į┌─Żą═ųąę└┤╬š{š¹├┐éĆę“╦ž▓ó▀MąąĘ┬šµĘų╬÷║¾Ż¼tierod_outer.y║═uca_outer.xī”æę╝▄▀\äėīWģóöĄĄ─ā×╗»ū„ė├▓╗├„’@Ż¼╣╩▓╗ėĶ┐╝æ]ĪŻŲõ╦³ÄūéĆę“╦žį┌Įø▀^ČÓ┤╬Ą³┤·║¾Ą├ĄĮö_äė┴┐Ż¼╚ń▒Ē4ĪŻ
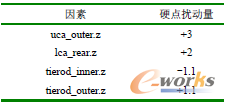
▒Ē4 ĻPµIę“╦žö_äė┴┐
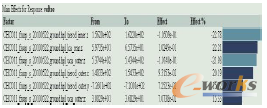
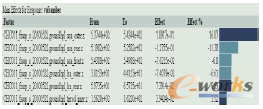
Ė∙ō■ņ`├¶Č╚┤¾ąĪš{š¹ė▓³cĪó─Żą═Ż¼į┌ČÓ┤╬▀MąąĘ┬šµī”▒╚įć“×öĄō■Ą─▀^│╠ųąĄ├│÷Ż║(1)ė▓³czū°ś╦ųĄ×ķš²ĢrŻ¼ī”æ¬Ą─Effect%×ķš²ĢrŻ¼ū°ś╦═∙š²Ą─ĘĮŽ“ūā╗»ī”æ¬Ēææ¬ūā║├Ż╗Effect%×ķžōĢrŻ¼ū°ś╦═∙žōĄ─ĘĮŽ“ūā╗»ī”æ¬Ēææ¬ūā║├ĪŻ(2)ė▓³czū°ś╦ųĄ×ķžōĢrŻ¼ī”æ¬Ą─Effect%×ķš²ĢrŻ¼ū°ś╦═∙žōĄ─ĘĮŽ“ūā╗»ī”æ¬Ēææ¬ūā║├Ż╗Effect%×ķžōĢrŻ¼ū°ś╦═∙š²Ą─ĘĮŽ“ūā╗»ī”æ¬Ēææ¬ūā║├ĪŻ
3.4ā×╗»ĮY╣¹┼cįć“×öĄō■ī”▒╚
ė├ā×╗»║¾Ą─ė▓³cū°ś╦ą▐š²─Żą═Ż¼į┘┤╬▀MąąŲĮąą▌å╠°Ę┬šµ║═Ę┤Ž“▌å╠°Ę┬šµĪŻ
ī”Ū░æę╝▄Ę┬šµĘų╬÷─Żą═▀Mąą═¼Ž“ŲĮąą▌å╠°äėįć“ׯ¼įOų├æę╝▄╔ŽŽ┬╠°äėŠÓļx×ķ60mmŻ¼Ą├ĄĮŪ░╩°ĮŪ║══ŌāAĮŪļS▌å╠°ūā╗»Ą─Ū·ŠĆŻ¼╚ńłD6ĪółD7ĪŻ
ī”Ū░æę╝▄Ę┬šµĘų╬÷─Żą═▀MąąĘ┤Ž“ŲĮąą▌å╠°äėįć“ׯ¼įOų├æę╝▄╔ŽŽ┬╠°äėŠÓļx×ķ60mmŻ¼Ą├ĄĮŪ░╩°ĮŪ║══ŌāAĮŪļS▄ć╔Ēé╚āAĮŪūā╗»Ą─Ū·ŠĆŻ¼╚ńłD8ĪółD9ĪŻ
łD10 Ū░æę╝▄Ū░╩°ĮŪūā╗»
łD11 Ū░æę╝▄═ŌāAĮŪūā╗»Ū·ŠĆ
łD12 Ū░æę╝▄Ū░╩°ĮŪūā╗»Ū·ŠĆ
łD13 Ū░æę╝▄═ŌāAĮŪūā╗»Ū·ŠĆ
łD10ĪółD11ĪółD12ĪółD13Ęųäe×ķā×╗»Ū░║¾▄ć▌åŪ░╩°ĮŪĪó═ŌāAĮŪĄ─Ū·ŠĆłDŻ¼Å─łDųą┐╔ęį┐┤│÷ā×╗»║¾─Żą═Ę┬šµĮY╣¹┼cKŻ”Cįć“×öĄō■╗∙▒Šę╗ų┬ĪŻ
ų┴┤╦Ż¼▒Ē├„CAE─Żą═K&C╠žąįĘ┬šµųĄĮėĮ³─┐ś╦╠žąįŻ¼╝┤īŹ▄ćæę╝▄K&C╠žąįįć“×ųĄŻ¼ęč▀_ĄĮ×ķ║¾└m▄ć▌vķ_░lįOėŗ╠ß╣®Ę┬šµöĄō■ų¦│ųĄ──┐Ą─ĪŻ
4 ĮYšō
1Īó└¹ė├ā×╗»╣żŠ▀ADAMS/lnsight┐╔ęįī”æę╝▄Ą─ė▓³c▀Mąąā×╗»Ż¼▓ó┤_Č©┴╦Ė„ė▓³c-3mmų┴3mmĄ─ā×╗»─┐ś╦ģ^ķgŻ¼Ūęā×╗»ĮY╣¹▒╚▌^└ĒŽļĪŻ
2Īó═©▀^┼c▄ć▌vK╠žąįįć“×öĄō■ī”▒╚Ż¼ā×╗»┴╦ADAMS─Żą═Ą─Š½Č╚Ż¼×ķæę╝▄Ą─ķ_░lįOėŗĪóĄū▒Pš{Į╠ęį╝░ī”š¹▄ć▓┘┐vĘĆČ©ąįĄ─Ęų╬÷ŅA£y┤“Ž┬┴╦╗∙ĄAĪŻ
3Īóį┌ČÓ╣żørĪóČÓĒææ¬ĪóČÓę“╦žĄ─Å═ļsņ`├¶Č╚Ęų╬÷ųą×ķ┴╦Ė³╝ė▒ŃĮ▌£╩┤_Ą─▀Mąąā×╗»Ż¼æ¬▒M┴┐ė├║å▒ŃĘĮ╩ĮŻ©└²╚ń▒ĒĖ±Ż®š¹└Ē│÷ÄūéĆĒææ¬Ą─╣▓═¼ę“╦ž╗“ė░Ēæ─│éĆĒææ¬Ą½▓╗ė░ĒæŲõ╦³Ēææ¬Ą─ę“╦žĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌ADAMS/Insight─ŻēKæę╝▄▀\äėīWņ`├¶Č╚Ęų╬÷╝░ā×╗»
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/support/11121516284.html