ĪĪĪĪ─┐Ū░Ż¼╗∙ė┌PC Ą─ķ_Ę┼╩ĮöĄ┐žŽĄĮy╩ŪöĄ┐ž╝╝ągķ_Ę┼╩Į╝▄śŗĄ─ų„ę¬īŹ¼FĘĮ╩ĮŻ¼▀@ĘNīŹ¼FĘĮ╩Įų„ę¬╩Ū┐╝æ]└¹ė├╣żśIPC žSĖ╗Ą─ŽĄĮy┘Yį┤║═śIęčś╦£╩╗»Ą─Įė┐┌üĒ║å╗»öĄ┐žŽĄĮyĄ─įOėŗŻ¼ĮĄĄ═öĄ┐žŽĄĮyķ_░lĄ─╝╝ągļyČ╚,▓ó╩╣įOėŗ│÷Ą─öĄ┐žŽĄĮyŠ▀ėąę╗Č©Ą─ķ_Ę┼ąįŻ¼Ą½▀@ĘN¾wŽĄĮYśŗę▓┤µį┌║▄┤¾Ą─ŠųŽ▐ąįŻ¼ų„ę¬¾w¼F×ķ: ó┘ŽĄĮyīŹĢrąį║═ĘĆČ©ąį▌^▓ŅŻ¼╗∙ė┌PC Ą─öĄ┐žŽĄĮyĄ─▓┘ū„ŽĄĮyČÓ▓╔ė├═©ė├▓┘ū„ŽĄĮyŻ¼┼cRTOSŽÓ▒╚Ż¼Ųõį┌╚╬äšš{Č╚Ą─īŹĢrąį║═ŽĄĮy▀\ąąĄ─ĘĆČ©ąį╔ŽČ╝▒╚▌^▓Ņ; ó┌ŽĄĮyĄ─ķ_Ę┼ąįėąŽ▐Ż¼¤ošō╩ŪPC ŪČ╚ļNC Ą─ĮYśŗŻ¼▀Ć╩ŪNCŪČ╚ļPC Ą─ĮYśŗŻ¼Ųõķ_Ę┼ąį╠žš„Č╝╩Ū╗∙ė┌PC ╣╠ėąĄ─ķ_Ę┼╠žš„Ż¼ø]ėąßśī”öĄ┐ž╝ė╣żĄ─╠ž³cČ°▀Mąąå╬¬ÜĄ─Č©┴x; ó█╣ż┐žÖC─Ż╩ĮöĄ┐žŽĄĮyĄ─│╔▒Š╠½Ė▀Ż¼ę╗┼_─▄ØMūŃöĄ┐ž╝ė╣żę¬Ū¾Ą─ėŗ╦ŃÖCų┴╔┘ąĶę¬═Č┘YöĄŪ¦į¬į┘┼õ╔ŽārĖ±░║┘FĄ─▀\äė┐žųŲ┐©Ż¼╩╣Ą├│╔▒Š║▄ļyĮĄĄ═ĪŻ
ĪĪĪĪ┴Ēę╗ĘĮ├µŻ¼▀M╚ļ20╩└╝o90─Ļ┤·ęįüĒŻ¼ŪČ╚ļ╩Įėŗ╦ŃÖCæ¬ė├╝╝ąg½@Ą├┴╦’w╦┘░lš╣ĪŻ Ė„ĘNĖ▀ąį─▄Ą─ŪČ╚ļ╩Į╬ó┐žųŲŲ„MCU īė│÷▓╗ĖFŻ¼┼cęįŪ░ŽÓ▒╚Ż¼ŪČ╚ļ╩Į╬ó┐žųŲŲ„Ą─CPU ▀\╦Ń╦┘Č╚┤¾┤¾╠ßĖ▀Ż¼╠Ä└ĒöĄō■īÆČ╚▓╗öÓ╝ė┤¾,Ė³ųžę¬Ą─╩ŪŲ¼╔Ž╝»│╔┘Yį┤įĮüĒįĮžSĖ╗; ┼c┤╦═¼ĢrŻ¼│÷¼F┴╦║▄ČÓĖ▀ą¦┬╩ĪóĖ▀┐╔┐┐ąį║═Ė▀ĘĆČ©ąįĄ─ā╚║╦┐╔▓├£pĄ─ŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮy(RTOS) Ż¼╚ńVxW orksĪóLC /OS-ó“Ą╚Ż¼▀@Š═╩╣ŪČ╚ļ╩ĮŽĄĮyį┌╔·╗Ņ║═╔·«aĄ─║▄ČÓŅIė“Č╝Ą├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├Ż¼╚ńŲ¹▄ć╣żśIĪóėŅ║Į╣żśIĄ╚ĪŻ ╗∙ė┌ęį╔ŽĘų╬÷Ż¼╣Pš▀╠ß│÷į┌öĄ┐žŽĄĮyĄ─įOėŗųą▓╔ė├ŪČ╚ļ╩Į╝╝ąg,╝┤╗∙ė┌╬ó┐žųŲŲ„Ą─ŪČ╚ļ╩ĮöĄ┐žŽĄĮyŻ¼▀@ĘNįOėŗĘĮ░ĖĄ─ā×ä▌į┌ė┌: ó┘╩ął÷╔Ž┐╔╣®▀xō±Ą─ŪČ╚ļ╩Į╬ó┐žųŲŲ„ĘNŅÉĘ▒ČÓŻ¼Ų¼╔Ž┘Yį┤žSĖ╗Ż¼ßśī”▓╗═¼Ą─æ¬ė├Ż¼ŲõŲ¼╔Ž╝»│╔┘Yį┤ėą║▄┤¾▓╗═¼Ż¼═Ļ╚½┐╔ęį▀xō±ę╗ĘNŲ¼╔Ž┘Yį┤║═▀\╦Ń╦┘Č╚Č╝ŽÓī”ĘŪ│Ż▀m║ŽöĄ┐žŽĄĮyįOėŗĄ─MCU ║═DSPüĒśŗĮ©öĄ┐žŽĄĮyĄ─ė▓╝■ŲĮ┼_Ż¼▀@ĘNė▓╝■ŲĮ┼_Ą─įOėŗ┐╔ęį╩╣ŽĄĮy╝»│╔Č╚Ė³Ė▀Ż¼¾wĘeĖ³ąĪŻ¼▀\ąąĖ³ĘĆČ©; ó┌öĄ┐žŽĄĮyĄ─▀\ąą╩Ūę╗éĆČÓ╚╬䚥─š{Č╚▀^│╠Ż¼╠ž³c╩Ū▀\ąą╚╬䚎Óī”▌^╔┘Ż¼Ą½īŹĢrąįę¬Ū¾║▄ÅŖŻ¼▓╗┤µį┌╚▀ėÓĄ─╚╬䚯¼Č°▓╔ė├RTOSū„×ķŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─▓┘ū„ŽĄĮyŻ¼īó╩╣öĄ┐žŽĄĮyōĒėąĖ³║├Ą─ČÓ╚╬äšš{Č╚─▄┴”║═Ė³ÅŖĄ─īŹĢrąį;ó█ŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─ķ_░l╩Ūę╗éĆÅ─Ąūīėė▓╝■ĄĮ╔Žīė▄ø╝■Ą─¬Ü┴óķ_░l▀^│╠Ż¼┐╔ęįßśī”«öĮ±öĄ┐žŽĄĮy╠ž³c║═ķ_Ę┼ąįĄ─╠žš„ę¬Ū¾Ż¼Ė∙ō■ŪČ╚ļ╩ĮŽĄĮyĄ─╠ž³cŻ¼üĒśŗĮ©▀m║Žė┌ŪČ╚ļ╩Įæ¬ė├Ą─öĄ┐žŽĄĮyķ_Ę┼╩Į╝▄śŗŻ¼┼c╗∙ė┌PC Ą─öĄ┐žŽĄĮyŽÓ▒╚Ż¼╦³īóėąĖ³║├Ą─ĘĆČ©ąį║═ķ_Ę┼ąįĪŻ
1 ╗∙ė┌MCU + DSPļpCPU ╝▄śŗĄ─ė▓╝■ŲĮ┼_┤ŅĮ©
ĪĪĖ∙ō■öĄ┐žŽĄĮyČÓ╚╬䚥─▀\ąą╠žš„Ż¼ßśī”ŽĄĮy╚╬äš▀\ąąīŹĢrąįĄ─╠ž╩Ōę¬Ū¾Ż¼ęį╝░ŪČ╚ļ╩ĮŽĄĮyĄ─╠ž³cŻ¼╬─ųą▓╔ė├MCU + DSPĄ─ļpCPU ╝▄śŗüĒśŗĮ©ŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─ė▓╝■ŲĮ┼_ĪŻ MCU Ą─ų„ę¬╣”─▄╩Ūžōž¤▀\ąąŽĄĮyųą┼c╣▄└ĒŽÓĻPĄ─╚╬䚯¼╩ŪŽĄĮyĄ─ų„┐žųŲCPU; Č°DSP ų„꬞ōž¤▀\ąą▓Õča▀\╦ŃĄ╚▀\╦Ń┴┐▌^┤¾Īóī”╚╬䚥─īŹĢrąįę¬Ū¾▌^Ė▀Ą─╚╬䚯¼īŻė├ė┌Ę▒ųžĄ─▓Õča▀\╦ŃŻ¼£p▌pų„┐žųŲCPU Ą─žōō·ĪŻ ▒ŠöĄ┐žŽĄĮyĄ─įOėŗŻ¼MCU ▀xė├MOTOROLA╣½╦Š╔·«aĄ─MC68K ŽĄ┴ąĄ─MC68F375╬ó┐žųŲŲ„Ż¼DSPät▀xė├NOVA ╔·«aĄ─DSP▀\äė┐žųŲīŻė├ąŠŲ¼MCX314ĪŻ
ĪĪĪĪ1.1 ŪČ╚ļ╩Į╬ó┐žųŲŲ„MC68F375║åĮķ
ĪĪĪĪMC68F375╩Ūė╔MOTOROLA ╣½╦Š═Ų│÷Ą─Ė▀╦┘32╬╗╬ó┐žųŲŲ„Ż¼╦³Š▀ėą╦┘Č╚┐ņĪó▓óąą╠Ä└Ē─▄┴”ÅŖ║═Ų¼╔Ž┘Yį┤žSĖ╗Ą╚╠ž³cŻ¼▀mė├ė┌Ė„ĘN┐žųŲł÷║ŽĪŻ ąŠŲ¼ų¦│ųBDM(background debug mode)─Ż╩ĮŻ¼═©▀^║åęūĄ─īŻė├ļŖ└|Įė┐┌Ż¼┐╔ęįų▒Įėī”╬ó┐žųŲŲ„ŽĄĮy▀MąąĘ┬šµķ_░l; ę▓┐╔▓╔ė├╚½╣”─▄Ą─į┌ŠĆĘ┬šµŲ„▀MąąīŹĢrķ_░lĪŻ ═¼Ģr,MC68F375ĘŪ│Ż▀m║Ž▀\ąąČÓė├æ¶ĪóČÓ╚╬äš▓┘ū„ŽĄĮyŻ¼╩╣ŲõĖ³╚▌ęūū÷ĄĮ▓╗╦└ÖCĪŻ
ĪĪĪĪMC68F375Ą─Ų¼╔Ž┘Yį┤ų„ę¬░³└©: ŽĄĮy╝»│╔─ŻēK(SIM ) ; 8 KB Ą¶ļŖ▒ŻūoSRAM; 8 KB č┌─ŻROM; 10╬╗ĻĀ┴ą╩ĮĄ──ŻöĄ▐DōQŲ„(QADC64) Ż¼16┬ĘA /D ▐DōQ─ŻēKŠ▀ėąÅŖ┤¾Ą─öĄ─Ż▐DōQ┐žųŲ╣”─▄; ĻĀ┴ą╩Į┤«ąą═©ą┼─ŻēK(QSMCM) Ż¼┐╔ęįĘĮ▒ŃĄžīŹ¼F═¼▓ĮĪó«É▓Į═©ą┼╣”─▄; ┐╔śŗįņĢrńŖ─ŻēK(CTM4) Ż¼Š▀ėąČÓĘNÅŖ┤¾Ą─Č©ĢrĪóėŗöĄ║═├}ø_š{ųŲ╣”─▄; Ģrķg╠Ä└Ēå╬į¬(TPU ) Ż¼Ęų▒µ┬╩Ė▀▀_250nsŻ¼┐╔ī”Ė„ĘN╩┬╝■▀Mąą┐ņ╦┘Ą─ųŪ─▄╠Ä└ĒŻ¼═¼Ģr╝»│╔PWM ╦ŃĘ©╝░Ė„ĘN▌ö╚ļ▓ČūĮ╦ŃĘ©; CAN ┐žųŲ─ŻēK( TouCAN ) Ż¼─▄ĘĮ▒ŃĄžīŹ¼F╣żśIūįäė╗»Ą╚ł÷║ŽĄ─¼Fł÷┐éŠĆ┐žųŲĪŻ
ĪĪĪĪ1.2 DSPīŻė├▀\äė┐žųŲąŠŲ¼MCX314║åĮķ
ĪĪĪĪMCX314╩ŪNOVAļŖūėėąŽ▐╣½╦ŠčąųŲĄ─DSP▀\äė┐žųŲīŻė├ąŠŲ¼Ż¼ąį─▄ā×┴╝Ż¼Įė┐┌║åå╬Ż¼ŠÄ│╠ĘĮ▒ŃŻ¼╣żū„┐╔┐┐Ż¼┐╔ÅVĘ║ė├ė┌öĄ┐žÖC┤▓╝░ÖCŲ„╚╦Ą╚ŅIė“Ą─▀\äė┐žųŲĪŻąŠŲ¼─▄┼c8╬╗╗“16╬╗öĄō■┐éŠĆĮė┐┌Ż¼═©▀^├³┴ŅĪóöĄō■║═ĀŅæBĄ╚╝─┤µŲ„īŹ¼F4▌S3┬ōäėĄ─╬╗ų├Īó╦┘Č╚Īó╝ė╦┘Č╚Ą╚Ą─▀\äė┐žųŲ║═īŹĢr▒O┐žŻ¼īŹ¼Fų▒ŠĆĪółA╗Ī║═╬╗į¬3ĘN─Ż╩ĮĄ─▄ē█E▓ÕčaŻ¼▌ö│÷├}ø_Ņl┬╩ūŅĖ▀▀_4MH zĪŻ ├┐▌SČ╝ėą╦┼Ę■Ę┤ü▌ö╚ļČ╦Īó4éĆ▌ö╚ļ³c║═8éĆ▌ö│÷³cŻ¼─▄¬Ü┴óįOų├×ķ║Ń╦┘ĪóŠĆąį╗“SŪ·ŠĆ╝ė/£p╦┘┐žųŲĘĮ╩ĮŻ¼▓óėą2éĆ32╬╗Ą─▀ē▌ŗĪóīŹļH╬╗ų├ėŗöĄŲ„║═ĀŅæB▒╚▌^╝─┤µŲ„,īŹ¼F╬╗ų├Ą─ķ]Łh┐žųŲĪŻ
ĪĪĪĪ┼c═©ė├DSPŽÓ▒╚Ż¼MCX314Ė³▀m║ŽöĄ┐žŽĄĮyĄ─įOėŗŻ¼╩Ūę╗ĘNīŻė├Ą─▀\äė┐žųŲąŠŲ¼Ż¼ų„ę¬▒Ē¼Fį┌3ĘĮ├µ:ó┘ ▓Õča╦ŃĘ©(╚²▌Sų▒ŠĆĪóŲĮ├µłA╗Ī║═╬╗─Ż╩Į▓Õča)Īó▀\äė┐žųŲ║═╬╗ų├┐žųŲų„ę¬ė╔ė▓╝■üĒīŹ¼FŻ¼ų„┐žųŲCPU ═©▀^Įė┐┌ī”MCX314▀MąąŽÓæ¬Ą─╣żū„ĘĮ╩ĮĪó╦┘Č╚║═╝ė╦┘Č╚Ą─įOų├Ż¼╚╗║¾īó▀\äėĄ─Ų³c║═ĮK³cé„╦═ĮoMCX314,ų«║¾▓╗į┘ąĶę¬ų„┐žųŲCPU Ą─Ė╔ŅAŠ═─▄ūįäė═Ļ│╔Å─Ų³cĄĮĮK³cĄ─▓Õča▀\äė┐žųŲŻ¼£p╔┘┴╦▀\ąą▀^│╠ųą┼cų„┐žųŲCPU ŅlĘ▒Ą─öĄō■Į╗ōQŻ¼ę▓£p╔┘┴╦ŽÓæ¬▄ø╝■Ą─įOėŗ,┐sČ╠öĄ┐žŽĄĮyĄ─ķ_░lčąųŲų▄Ų┌Ż¼Ūę─▄╠ßĖ▀ŽĄĮyĄ─▀\ąą╦┘Č╚; ó┌Ų¼╔Ž╝»│╔ėąīŻė├ė┌▀\äė┐žųŲĄ─I/OĮė┐┌Ż¼╚ńė▓╝■Ž▐╬╗Īó╝▒═ŻĄ╚Ż¼┐╔║å╗»öĄ┐žŽĄĮyĄ─ė▓╝■įOėŗŻ¼╠ßĖ▀ŽĄĮy▀\ąąĄ─ĘĆČ©ąį; ó█┼cų„┐žųŲCPU ų«ķgĄ─═©ėŹ║åå╬,ęūė┌ģfš{Ż¼ī”ų„┐žųŲCPU üĒšfŻ¼MCX314Ė³Ž±╩Ūę╗éĆ═Ōć·╣”─▄ąŠŲ¼Ż¼═©▀^įOų├ę╗Č©Ą─ĄžųĘ║═ūxīæ┐žųŲūųŠ═─▄īŹ¼Fī”MCX314Ą─┐žųŲĪŻ
ĪĪĪĪ1.3 ŪČ╚ļ╩ĮöĄ┐žŽĄĮyė▓╝■ŲĮ┼_Ą─┤ŅĮ©
ĪĪĪĪłD1×ķ▒Š╬─蹊┐Ą─ŪČ╚ļ╩ĮöĄ┐žŽĄĮyė▓╝■ŲĮ┼_─ŻēKłDŻ¼ęįMC68F375║═MCX314×ķė▓╝■ŲĮ┼_Ą─║╦ą─Ż¼Ė∙ō■öĄ┐žŽĄĮyĄ─╣”─▄╠ž³c║═╣żū„╠žąįę¬Ū¾Ż¼ĘųäeöUš╣┴╦╚ńŽ┬ČÓĘN╣”─▄─ŻēKĪŻ
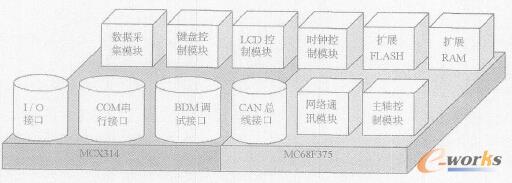
łD1 ŪČ╚ļ╩ĮöĄ┐žŽĄĮyė▓╝■ŲĮ┼_─ŻēK
ĪĪĪĪ(1) öUš╣FLASH ─ŻēKŻ¼MC68F375Ų¼╔Ž╝»│╔ėą8Kūų╣ØĄ─č┌─ŻROMŻ¼Ą½▀@ī”ė┌öĄ┐žŽĄĮyĄ─▀\ąą╩Ū▀h▀h▓╗ē“Ą─Ż¼▒žĒÜ▀MąąŲ¼═ŌöUš╣ĪŻ į┌ŽĄĮyįOėŗųąŻ¼ų„ę¬╩Ūį┌Ų¼═ŌöUš╣┴╦2Ų¼512Kūų╣ØĄ─FLASHŻ¼ų„ę¬ė├ė┌┤µā”ŽĄĮy▀\ąą╦∙ąĶĄ─│╠ą“┤·┤aŻ¼šZčįūųÄņŻ¼ąĶę¬öÓļŖ║═ķLŲ┌▒Ż┤µĄ─ŽĄĮyģóöĄĪóĄČŠ▀ģóöĄĪóčaāöģóöĄĪóÖC┤▓ģóöĄęį╝░öĄ┐ž╝ė╣ż│╠ą“Ą╚ĪŻ
ĪĪĪĪ(2) öUš╣RAM─ŻēKŻ¼ļm╚╗MC68F375Ų¼╔Ž╝»│╔ėą8Kūų╣ØĄ─SRAMŻ¼Ą½ė╔ė┌öĄ┐žŽĄĮy▓╗═¼ė┌ąĪą═Ą─ŪČ╚ļ╩ĮŽĄĮyŻ¼į┌▀\ąą▀^│╠ųąąĶę¬ėą│õūŃĄ─RAM ┐šķgŻ¼╠žäe╩Ūė╔ė┌▀\╦Ń║═RTOSĄ─ČÓ╚╬äšš{Č╚ęį╝░╬─╝■ŽĄĮyĄ─▀\ąąČ╝īó«a╔·┤¾┴┐Ą─Č茯Īó╚½Šųūā┴┐║═Šų▓┐ūā┴┐Ż¼Č°Ūęė╔ė┌ŽĄĮyā╚ų├▄øPLC( PLCĄ─ā╚▓┐└^ļŖŲ„RĪóČ©ĢrŲ„T ║═ėŗöĄŲ„C)Ą─▀\ąąę▓īóš╝ė├ę╗▓┐ĘųRAM ┐šķgŻ¼ę“┤╦į┌öĄ┐žŽĄĮyįOėŗĢrŻ¼į┌Ų¼═ŌöUš╣┴╦2Ų¼512Kūų╣ØĄ─ņoæBĖ▀╦┘RAMŻ¼ė├ė┌öUš╣RAM┐šķgŻ¼į÷ÅŖŽĄĮyĄ─▀\ąąą¦┬╩║═īŹĢrąįĪŻ
ĪĪĪĪ(3) ĢrńŖ┐žųŲ─ŻēKŻ¼ę▓Š═╩Ū╚šÜvŽĄĮyŻ¼ąĶę¬į┌ŽĄĮyöÓļŖĢr─▄ē“ķLĢrķgĄ─▒Ż│ų╚šÜvĄ─╣żū„ĀŅæBĪŻ «öŽĄĮy╣żū„ĢrŻ¼▀MąąĄĮ╬─╝■ŽÓĻP▓┘ū„ĢrŻ¼╚ńį┌öĄō■é„▌ö╗“ė├æ¶į┌ī”ŽĄĮy▀MąąŠÄ│╠ĪóČ■┤╬ķ_░lĢrŻ¼Č╝ąĶę¬öĄō■ęį╬─╝■Ą─ą╬╩Į▀Mąą┤µā”╗“é„▌öŻ¼ąĶę¬ėøõøŽ┬╬─╝■ŠÄīæĄ─╚šŲ┌Ż¼ęį▒Ń╬─╝■ŽĄĮyĄ─╣▄└ĒĪŻ
ĪĪĪĪ(4) LCD┐žųŲ─ŻēKŻ¼ų„ę¬ė├ė┌═Ļ│╔ę║Š¦’@╩ŠĄ─┐žųŲ╦óą┬║═┼cCPU32Ą─öĄō■Į╗ōQŻ¼īóÖC┤▓Ą─«öŪ░ĀŅæBĪóŽĄĮyą┼ŽóĪóū°ś╦ą┼ŽóĪóģóöĄą┼Žó║═łDą╬Ę┬šµą┼ŽóĄ╚═©▀^LCDŽ“ė├涒@╩Š│÷üĒŻ¼ī┘╚╦ÖCĮ╗╗źĄ─ę╗▓┐ĘųĪŻ
ĪĪĪĪ(5) µI▒P┐žųŲ─ŻēKŻ¼╦³╩ŪöĄ┐žŽĄĮyĮ╗╗źĄ─ųžę¬Łh╣ØŻ¼µI▒PöUš╣ļŖ┬ĘėąČÓĘNīŹ¼FĘĮ╩ĮŻ¼įOėŗ▓╔ė├CPLD üĒīŹ¼FīŻė├µI▒PĮė┐┌ąŠŲ¼Ą─įOėŗĘĮ░ĖŻ¼▀@ĘNįOėŗĘĮ░ĖŻ¼╝╚▒ŻūC┴╦įOėŗĄ─═©ė├ąį║═ņ`╗ŅąįŻ¼═¼Ģr╦∙ėąĄ─µIųĄ┼ąöÓĄ╚┐╔═©▀^CPLD ŠÄ│╠üĒīŹ¼FŻ¼ūŅ┤¾Ž▐Č╚╣Ø╩Ī┴╦MC68F375Ą─┘Yį┤ĪŻ
ĪĪĪĪ(6) öĄō■▓╔╝»─ŻēKŻ¼«öĮ±Ą─öĄ┐žŽĄĮyįĮüĒįĮųžęĢī”¼Fł÷╝ė╣żŚl╝■║═ÖC┤▓╣żū„ĀŅæBĄ─īŹĢr▒O┐ž║═į\öÓŻ¼▒ŠŽĄĮyöĄō■▓╔╝»─ŻēKįOėŗų„ę¬╩Ū╗∙ė┌MC68F375Ų¼╔Ž╝»│╔Ą─16 ┬ĘQADCŻ¼═Ō╝ė┐╣╗ņ×V▓©å╬į¬║═ą┼╠¢š{└Ēå╬į¬ĪŻ
ĪĪĪĪ(7) ų„▌S┐žųŲ─ŻēKŻ¼ė╔D /A┐žųŲąŠŲ¼║═ŠÄ┤aŲ„Ę┤üĖ▀╦┘▌ö╚ļ┐┌ĮM│╔Ż¼─▄ē“═Ļ│╔ī”å╬śOąį║═ļpśOąį─ŻöMūāŅlų„▌SĄ─┐žųŲĪŻ
ĪĪĪĪ(8) ŠWĮj═©ėŹ─ŻēKŻ¼×ķ┴╦▀mæ¬öĄ┐žŽĄĮyŠWĮj╗»Ą─░lš╣┌ģä▌║═öĄ┐žÖC┤▓▀h│╠┐žųŲ║═▀h│╠į\öÓĄ─░lš╣ąĶ꬯¼įOėŗ▓╔ė├Realtek╣½╦ŠĄ─10MbpsŠWĮj═©ėŹąŠŲ¼RTL8019▀MąąŽĄĮyŠWĮjĮė┐┌─ŻēKĄ─įOėŗŻ¼×ķÖC┤▓Ą─ŠWĮj╗»╠ß╣®┴╦ė▓╝■╗∙ĄAĪŻ
ĪĪĪĪ(9) CAN ┐éŠĆĮė┐┌Ż¼ų„ę¬ė╔CAN ┐éŠĆ╩š░lŲ„║═╣Ō┼║į¬╝■ĮM│╔Ż¼┼cMC68F375 Ų¼╔Ž╝»│╔Ą─TouCAN ─ŻēKę╗Ųśŗ│╔öĄ┐žŽĄĮyCAN ┐éŠĆ═©ėŹ╣”─▄Ą─ė▓╝■╗∙ĄAĪŻ
ĪĪĪĪ(10) BDM š{įćĮė┐┌Ż¼ė├ė┌öĄ┐žŽĄĮyĄ─ķ_░lš{įćļAČ╬Ż¼į┌╔Ž╬╗ėŗ╦ŃÖC╔ŽŻ¼ķ_░l╚╦åT═©▀^BDM ┐╔ĘĮ▒ŃĄžī”öĄ┐žŽĄĮy▀Mąąķ_░lš{įćĪŻ
ĪĪĪĪ(11) COM ┤«ąąĮė┐┌Ż¼ų„ę¬└¹ė├MC68F375 Ų¼╔Ž╝»│╔Ą─QSM Ą─SC Iūė─ŻēKŻ¼═Ō╝ėąŠŲ¼“īäėļŖ┬Ę(╚ńMAX238Ą╚) Ż¼śŗ│╔öĄ┐žŽĄĮy┼céĆ╚╦ėŗ╦ŃÖCų«ķg┤«ąą═©ėŹĄ─ė▓╝■╗∙ĄAĪŻ
ĪĪĪĪ(12) I/OĮė┐┌Ż¼ų„ę¬═Ļ│╔ā╚ų├PLCī”═Ō▓┐ÖC┤▓ļŖÜŌĄ─┐žųŲŻ¼ļŖÖC┐žųŲ▌ö│÷║═Ųõ╦¹╣”─▄─ŻēKĄ─ī”═Ō▌ö│÷,ė╔“īäėį¬╝■Īó└^ļŖŲ„į¬╝■║═╣Ō±ŅĖ¶ļxį¬╝■Ą╚ĮM│╔ĪŻ═©▀^╔Ž├µī”ŪČ╚ļ╩ĮöĄ┐žŽĄĮyė▓╝■┐“╝▄Ą─┤ŅĮ©║═Ė„éĆė▓╝■╣”─▄─ŻēKĄ─Ęų╬÷┐╔ų¬Ż¼▒Š╬─įOėŗĄ─ŪČ╚ļ╩ĮöĄ┐žŽĄĮy│²▒Ż┴¶┴╦é„ĮyöĄ┐žŽĄĮyĄ─╣”─▄═ŌŻ¼╠žäe╝ė╚ļ┴╦öĄō■▓╔╝»─ŻēKĪóŠWĮj═©ėŹ─ŻēK║═CAN ┐éŠĆ═©ėŹ─ŻēKŻ¼═©▀^▀@3éĆ─ŻēKŻ¼įOėŗ│÷Ą─öĄ┐žŽĄĮy─▄║▄ĘĮ▒ŃĄžīŹ¼F┼c¼Fł÷Ųõ╦¹įOéõĄ─┐éŠĆ▀BĮė║═ŠWĮj═©ėŹŻ¼Ė³ęūė┌īŹ¼FöĄ┐žįOéõĄ─▀h│╠į\öÓĪó▒O┐žęį╝░ŠWĮj╗»║═öĄūų╗»ųŲįņĪŻ
2 ╗∙ė┌RTOSĄ─ŪČ╚ļ╩ĮöĄ┐žŽĄĮy▄ø╝■ŲĮ┼_Ą─蹊┐
ĪĪĪĪęįŪ░Ą─öĄ┐žŽĄĮyĄ─▄ø╝■ĮYśŗįOėŗ═©│Ż═©▀^ę╗éƤoŽ▐裣hüĒ┼ąöÓ╚╬䚥─ś╦ųŠ┴┐Ż¼═©▀^ųąöÓ(Č©ĢrųąöÓ║═µI▒PųąöÓ)üĒ╝ż╗Ņą┬Ą─╚╬䚯¼▀M╚ļ╣╠Č©Ą─╚╬äšųąöÓ│╠ą“╚ļ┐┌Ż¼üĒīŹ¼F╚╬䚥─š{Č╚ĪŻ į┌▀@ĘNå╬╚╬äšŪę¤o╚╬äš▀\ąąŁhŠ│š{Č╚ĘĮ╩ĮŽ┬Ż¼ŽĄĮyĄ─┤¾ČÓöĄĢrķg▒╗╚╬䚥╚┤²Ą─¤oŽ▐裣hš╝ō■┴╦Ż¼į┌╚╬äš╠Ä└ĒĄ─▀^│╠ųąŻ¼Ųõ╦¹Ą─═¼Ą╚╝ēĄ─╚╬䚤oĘ©╩╣ė├CPU Ą─┘Yį┤Ż¼¤oĘ©▀Mąą╚╬äšų«ķgėąą¦Ą─╔ŽŽ┬╬─ŪąōQŻ¼ī¦ų┬┴╦ŽĄĮyĄ─īŹĢrąį╩«Ęų▓╗┐╔┐┐ĪŻ ═¼ĢrŻ¼╚ń╣¹╚╬äšį┌ł╠ąą▀^│╠ųąąĶꬥ╚┤²ą┼╠¢Ż¼╗“čėĢrą┼╠¢╠Ä└ĒŻ¼«ö▀@ĘNčėĢr▓╗┐╔ŅAėŗĄ─ŪķørŽ┬Ż¼Š═┐╔─▄š╝ō■┤¾┴┐Ą─ŽĄĮyĢrķgŻ¼Š═Ģ■įņ│╔ī”ŽĄĮy┘Yį┤Ą─┤¾┴┐└╦┘MŻ¼ī¦ų┬¤oĘ©Ēææ¬Ė³Šo╝▒Ą─╚╬䚯¼▀@ĘN¤oŽ▐Ą─Ą╚┤²ŪķørĢ■ī¦ų┬įSČÓ▓╗┐╔ŅAėŗĄ─║¾╣¹ĪŻ ßśī”å╬╚╬䚎ĄĮyĄ─▄ø╝■╝▄śŗĄ─▓╗ūŃŻ¼▒ŠįOėŗį┌öĄ┐žŽĄĮy▄ø╝■śŗĮ©ųąę²╚ļ╗∙ė┌VxWo rksŪČ╚ļ╩ĮīŹĢrČÓ╚╬äš▓┘ū„ŽĄĮy(RTOS)ū„×ķŽĄĮyĄ─╚╬äšš{Č╚╗∙ĄAĪŻ
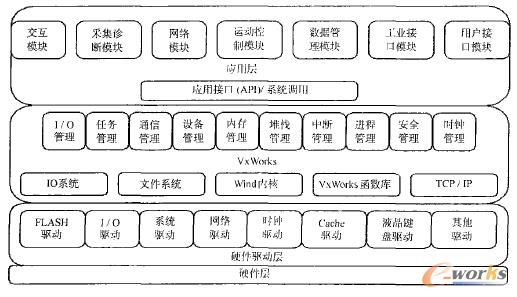
ĪĪĪĪ2.1 ŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮyVxWorks╠ž³c║åĮķ
ĪĪĪĪVxWorks▓┘ū„ŽĄĮy╩Ū├└ć°W indR iver╣½╦ŠįOėŗķ_░lĄ─ę╗ĘNŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮy( RTOS)ĪŻ ŽĄĮyŠ▀ėą╚ńŽ┬╠ž³c: ó┘ ā╚║╦┐╔▓├╝¶Ż¼Š▀ėąśO║├Ą─╔ņ┐sąį; ó┌│╔╩ņĖ▀ą¦Ą─╚╬äšš{Č╚ÖCųŲŻ¼ų¦│ųā׎╚╝ē║═ĢrķgŲ¼▌åĘ¼š{Č╚Ę©; ó█ ╚╬äšķg═©ėŹ╩ųČ╬ņ`╗Ņ┐ņ╦┘Ż¼ų¦│ųą┼╠¢┴┐Ī󎹎óĻĀ┴ą║═╗ź│ŌĄ╚ČÓĘN═©ą┼ĘĮ╩Į; ó▄ žSĖ╗Ą─░Õ╝ēų¦│ų▄ø╝■░³( BSP) Ż¼┐sČ╠┴╦ŽĄĮyķ_░lų▄Ų┌Ż¼£p╔┘┴╦ķ_░lĄ─╣żū„┴┐; ó▌ ÅŖ┤¾Ą─ŠWĮjķ_░lų¦│ųŻ¼║å╗»┴╦ŠWĮjķ_░lĄ─╣żū„,ŽĄĮy╝»│╔TCP / IPģfūhĄ─ų¦│ų; ó▐ ų¦│ųČÓĘN╬─╝■ŽĄĮy;ó▀ Š▀ėą╝»│╔ķ_░lŁhŠ│TORNADO Ą─ų¦│ųŻ¼Įń├µėč║├,─▄ē“ī”ŽĄĮyĄ─╚╬äšš{Č╚║═š╝ė├Ą─ĢrķgŲ¼▀MąąīŹĢr▒O┐žŻ¼╠ßĖ▀ŽĄĮyĄ─└¹ė├┬╩Ż¼│õĘų░lō]ŽĄĮyąį─▄; óÓ ╣”─▄┐╔öUš╣Ż¼Ė∙ō■Ū¦ūā╚f╗»Ą─ŪČ╚ļ╩Įæ¬ė├Ż¼│²╠ß╣®╗∙▒ŠĄ─ā╚║╦╣”─▄═ŌŻ¼▀Ć┐╔ęįĖ∙ō■ąĶę¬╝ė╚ļ╣”║─┐žųŲĪóŪČ╚ļ╩Į╬─╝■ŽĄĮyĪóŪČ╚ļ╩ĮGU IŽĄĮy║═ŪČ╚ļ╩ĮöĄō■ÄņŻ¼ė├æ¶ę▓┐╔ęįĖ∙ō■ūį╝║Ą─ąĶę¬└¹ė├VxWorksĄ─╣”─▄öUš╣Įė┐┌Ż¼ķ_░l│÷ūį╝║Ą─╣”─▄; óß ā╚║╦┐╔äāŖZąįŻ¼╝┤«öŪ░ŽĄĮy┐é╩Ū▀\ąąŠ═ŠwĀŅæBŽ┬ā׎╚╝ēūŅĖ▀Ą─╚╬äšĪŻ
ĪĪĪĪ2.2 ╗∙ė┌VxWorksĄ─ŪČ╚ļ╩ĮöĄ┐žŽĄĮyīė┤╬╗»▄ø╝■¾wŽĄĮYśŗįOėŗ
ĪĪĪĪ▒Š╬─įOėŗĄ─ŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─īė┤╬╗»▄ø╝■¾wŽĄĮYśŗ╚ńłD2╦∙╩ŠŻ¼╦³ė╔ęįŽ┬3▓┐ĘųĮM│╔ĪŻ
łD2 ╗∙ė┌VxWorksĄ─ŪČ╚ļ╩ĮöĄ┐žŽĄĮy▄ø╝■¾wŽĄĮYśŗ
ĪĪĪĪ(1) Ąūīėė▓╝■“īäėīėĪŻ ė▓╝■“īäė│╠ą“Ą─ų„ę¬╣”─▄╩Ū×ķ╔Žīė▄ø╝■╠ß╣®┴╝║├Ą─║»öĄš{ė├Įė┐┌Ż¼═Ļ│╔ī”ŽĄĮyė▓╝■┘Yį┤Ą─│ķŽ¾Ż¼Ų┴▒╬Ą¶ĄūīėĄ─ė▓╝■╝Ü╣ØĪŻ ═©▀^│ķŽ¾Ąūīėė▓╝■Ą─╬’└Ēąą×ķŻ¼╩╣╔Žīėė├æ¶īŹ¼Fī”ė▓╝■╣”─▄Ą─š{ė├ĪŻ ė▓╝■“īäė│╠ą“å╬¬ÜĘųīėĄ─ŠÄ│╠╦╝Žļ×ķŽĄĮyĄ─╔²╝ē╠ß╣®┴╦┴╝║├Ą─Śl╝■Ż¼«öŽĄĮyė▓╝■įOėŗ░l╔·ūā╗»ĢrŻ¼╔Žīė▄ø╝■▓╗ė├ū÷▀^ČÓĄ─ą▐Ė─Ż¼╚į┐╔ęį═©▀^įŁėąĄ─Įė┐┌īŹ¼Fė▓╝■Ą─š{ė├Ż¼ų╗ąĶꬹ▐Ė─Ąūīė“īäėŠ═┐╔ęį┴╦ĪŻ ┴Ē═ŌŻ¼ė▓╝■“īäė│╠ą“Ą─╠ß│÷─▄ē“ĘĮ▒ŃĒŚ─┐ķ_░lŻ¼▄øė▓╝■ģf═¼▀MąąįOėŗĪŻ
ĪĪĪĪ(2) īŹĢr▓┘ū„ŽĄĮyīėĪŻ įOėŗ▓╔ė├┴╦īŹĢrąį▓┘ū„ŽĄĮyVxWorksū„×ķŽĄĮy╚╬äšš{Č╚┼cķ_░lŲĮ┼_Ż¼▒ŠīėĄ─ų„ę¬╣”─▄╩Ū╠Ä└Ēė╔═Ō▓┐╗“ā╚▓┐╩┬╝■ę²░lĄ─ųąöÓĪóįOéõ“īäėīėĄ─╝ż╗Ņęį╝░ł╠ąą╚╬䚥─š{Č╚ĪŻ
ĪĪĪĪ(3) ŽĄĮyæ¬ė├īėĪŻ ╦³╩Ūį┌VxW orksĄ─╗∙ĄA╔ŽŻ¼═©▀^ī”VxWorksĄ─Įė┐┌║»öĄĄ─ŽĄĮyš{ė├Ż¼īŹ¼FŽĄĮyĄ─Š▀¾wĄ─æ¬ė├╣”─▄Ż¼╚ńĮ╗╗ź─ŻēKĪó┐žųŲ─ŻēKĄ╚ĪŻ į┌▒ŠįOėŗųąŻ¼Ė„ĘN╚╬äšęįæ¬ė├│╠ą“Ą─ą╬╩Į╝»║Žį┌æ¬ė├īėŻ¼Ę■äšė┌▓╗═¼Ą─╣”─▄─ŻēKĪŻ VxW roksĖ∙ō■├┐éĆ╚╬䚥─ę¬Ū¾Ż¼▀Mąą┘Yį┤╣▄└ĒŻ¼ī”MC68F375ĪóMCX314Īó┤µā”Ų„║══ŌįOĄ─┘Yį┤▀Mąą║Ž└ĒĘų┼õŻ¼īŹ¼FŽ¹Žó╣▄└ĒĪó╚╬äšš{Č╚║═«É│Ż╠Ä└ĒĄ╚╣żū„ĪŻ į┌VxW orksĄ─ų¦│ųŽ┬Ż¼├┐éĆ╚╬äšČ╝▒╗Ęų┼õę╗éĆā׎╚╝ēŻ¼Ė∙ō■ā׎╚╝ēäeĄ─Ė▀Ą═Ż¼äėæBŪąōQĖ„éĆ╚╬䚯¼ęį▒ŻūCīŹĢrąįę¬Ū¾ĪŻ
ĪĪĪĪ┐╔ęį┐┤│÷Ż¼įOėŗ▓╔ė├Ęųīėą═─ŻēK╗»▄ø╝■ĮYśŗ║═īŹĢrąį▓┘ū„ŽĄĮyŽÓĮY║ŽĄ─▄ø╝■įOėŗĘĮ░ĖŻ¼▀@ĘNįOėŗĘĮĘ©Ą─ā×ä▌į┌ė┌┐╔ęįīŹ¼F▄øė▓╝■įOėŗĄ─▓óąąķ_░lŻ¼VxWorksū„×ķŽĄĮyĄ─ė▓╝■“īäėīė┼cæ¬ė├īėų«ķgĄ─ś“┴║,╩╣æ¬ė├īėĄ─║»öĄš{ė├═Ļ╚½Ų┴▒╬Ą¶┴╦ė▓╝■╝Ü╣ØŻ¼īė┼cīėų«ķgų╗ąĶę¬═©▀^Č©┴x║├Ą─Įė┐┌║»öĄ▀Mąą═©ėŹŻ¼╩╣Ą├╔ŽīėĄ─▄ø╝■ķ_░l▓╗▒žŅÖæ]ė▓╝■įOėŗĪŻ ▀@ĘN▄ø╝■įOėŗ─Ż╩Į,īŹļH╔Ž╩Ū▄øė▓╝■Į╗▓µ▀MąąĪó▓óąąįOėŗĄ─▀^│╠Ż¼į┌įOėŗĄ─ķ_╩╝ļAČ╬Ż¼═©▀^▄øė▓╝■Ą─ģf╔╠Ż¼Č©┴xŽĄĮyĄ─┐é¾wįOėŗĘĮ░ĖŻ¼ę╗Ą®ŽĄĮyĄ─¾wŽĄĮYśŗįOėŗ═Ļ│╔Ż¼▄øė▓╝■įOėŗŠ═┐╔ęį¬Ü┴ó▀Mąą┴╦ĪŻ Ą╚▄øė▓╝■įOėŗ═Ļ│╔║¾Ż¼į┘╝»│╔ę╗¾w▀Mąą╝»│╔£yįćŻ¼╩╣ŽĄĮyĄ─ķ_░lų▄Ų┌┐sČ╠ĄĮūŅąĪŻ¼śO┤¾Ąž╠ßĖ▀┴╦ŪČ╚ļ╩ĮŽĄĮyĄ─ķ_░lą¦┬╩ĪŻ
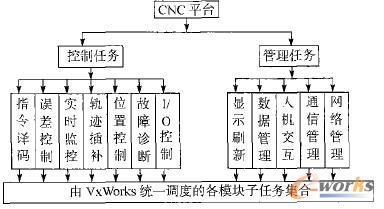
2.3 ╗∙ė┌VxWorksĄ─öĄ┐žŽĄĮyČÓ╚╬äšš{Č╚ÖCųŲĄ─īŹ¼F
ĪĪĪĪ2.3.1 öĄ┐žŽĄĮyųą╚╬䚥─äØĘų
ĪĪĪĪöĄ┐žŽĄĮy╩Ūę╗éĆīŻė├ąį║▄ÅŖĄ─ČÓ╚╬äšš{Č╚▀\ąąŽĄĮyŻ¼░┤šš╚╬äš▀\ąąīŹĢrąįÅŖ╚§Ą─äØĘųĘĮĘ©Ż¼ę╗░ŃīóöĄ┐žŽĄĮyĄ─╚╬äšäØĘų×ķ╣▄└Ē╚╬äš║═┐žųŲ╚╬äš2┤¾ŅÉĪŻ ╚ńłD3╦∙╩ŠŻ¼Ųõųą┐žųŲŅÉ╚╬䚥─╣żū„┼cöĄ┐ž╝ė╣żų▒ĮėŽÓ▀B,ī”īŹĢrąįę¬Ū¾Ė▀Ż¼Č°╣▄└ĒŅÉ╚╬䚥─╣żū„ī”īŹĢrąįĄ─ę¬Ū¾ŽÓī”▌^Ą═ĪŻ ŽĄĮyĄ─┐žųŲ╚╬äšėų┐╔╝ÜĘų×ķ╬╗ų├┐žųŲĪó▄ē█E▓ÕčaĪóųĖ┴Ņūg┤aĪóI/O ┐žųŲĪóš`▓Ņ┐žųŲĪóĀŅæBīŹĢr▒O┐ž┼c╣╩šŽį\öÓĄ╚ūė╚╬äš; ŽĄĮyĄ─╣▄└Ē╚╬äšät░³└©╚╦ÖCĮ╗╗ź╣▄└ĒĪó’@╩Š╣▄└ĒĪóöĄō■╣▄└ĒĪó═©ą┼╣▄└Ē║═ŠWĮj╣▄└ĒĄ╚ūė╚╬äšĪŻ Č°ŪęŻ¼į┌īŹļHĄ─ķ_░lįOėŗųą┐╔Ė∙ō■ąĶę¬ī”Ė„éĆūė╚╬äš▀Mąą▀Mę╗▓Į╝ÜĘųŻ¼ą╬│╔ę╗éĆ╚╬äš╝»║ŽŻ¼╚╬äš╝»║ŽųąĄ─╚╬äšČ╝▒žĒÜĖ∙ō■═Ō▓┐╩┬╝■╝░Ģr▒╗╝ż╗Ņ▀\ąąŻ¼═¼ĢrĮY║ŽŠ▀¾wĄ─╝ė╣żŪķørŻ¼ė╔V xWorksĮyę╗š{Č╚Ż¼äėæBĄžī”╚╬äš▀Mąąā׎╚╝ē┐žųŲŻ¼ęį▀mæ¬▓╗═¼╝ė╣ż╚╬䚥─ę¬Ū¾ĪŻ«öėąĖ▀ā׎╚╝ēĄ─╚╬äš▀M╚ļ╚╬äš┴ą▒ĒĢrŻ¼ā╚║╦═©▀^ā׎╚╝ēōīš╝š{Č╚ĘĮ╩ĮŪąōQĄĮĖ▀ā׎╚╝ēĄ─╚╬äš; «ö═¼Ą╚ā׎╚╝ēĄ─ČÓéĆ╚╬äš▀M╚ļ╚╬äš┴ą▒ĒĢrŻ¼ā╚║╦═©▀^ĢrķgŲ¼▌å▐Dš{Č╚Ę©īŹ¼FČÓ╚╬䚥─▓ó░l┐žųŲĪŻ
łD3 öĄ┐žŽĄĮyųą╚╬䚥─äØĘų
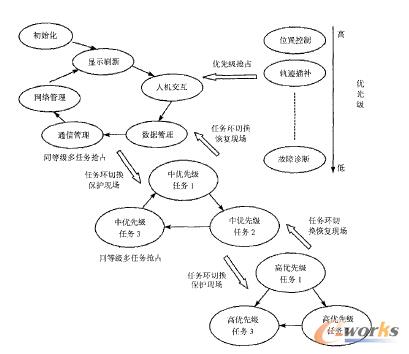
ĪĪĪĪ2.3.2 öĄ┐žŽĄĮyųąČÓ╚╬äšš{Č╚ÖCųŲĄ─īŹ¼F
ĪĪĪĪłD3ųąäØĘų│÷Ą─öĄ┐žŽĄĮy╚╬äšė╔VxWo rks▀MąąĮyę╗š{Č╚Ż¼ė╔Ū░├µĘų╬÷┐╔ų¬VxW orksų¦│ųā׎╚╝ē║═ĢrķgŲ¼▌åĘ¼š{Č╚Ę©Ż¼¼FīółD3ųąĄ─┐žųŲ╚╬äš░┤ššā׎╚╝ēė╔Ė▀ĄĮĄ═Ą─Ēśą“┼┼┴ą╚ńŽ┬: ╬╗ų├┐žųŲĪó▄ē█E▓ÕčaĪóš`▓Ņ┐žųŲĪóI/O ┐žųŲĪóųĖ┴Ņūg┤aĪóīŹĢr▒O┐žĪó╣╩šŽį\öÓ; Č°╣▄└Ē╚╬䚥─ā׎╚╝ēę¬▒╚┐žųŲ╚╬䚥─ā׎╚╝ēČ╝Ą═Ż¼ŽĄĮyįOėŗųąī”╣▄└Ē╚╬䚥─5éĆūė╚╬äš▓╔ė├ĢrķgŲ¼▌åĘ¼š{Č╚Ę©,╝┤╦³éāōĒėąŽÓ═¼Ą─ā׎╚╝ēŻ¼╚╬äšš{Č╚Ą─╩ŠęŌ╚ńłD4╦∙╩ŠĪŻ į┌ŽĄĮy═Ļ│╔│§╩╝╗»║¾ūįäė▀M╚ļĢrķgĘų┼õŁhųąŻ¼į┌Łhųąę└┤╬▌å┴„╠Ä└ĒĖ„ĒŚ╣▄└Ē╚╬äšĪŻ į┌Łhųą▌å┴„╠Ä└ĒĖ„ĒŚ╣▄└Ē╚╬äšĢrŻ¼ų╗ꬫöŪ░ĢrķgŲ¼ĮY╩°Ż¼▓╗šō«öŪ░╚╬äš╩Ūʱ═Ļ│╔Ż¼Č╝ę¬Ģ║ĢrßīĘ┼CPUŻ¼░čCPU ūīĮo┴Ēę╗éĆŠ═ŠwĄ─╚╬䚯¼ų▒ĄĮį┘┤╬▌åĄĮįō╚╬䚥─ĢrķgŲ¼ĢrŻ¼į┘ųžą┬š╝ė├CPUŻ¼ūįäė╠°▐DĄĮöÓ³c╠Ä└^└mł╠ąąĪŻ Č°ī”ė┌ŽĄĮyųąĄ─īŹĢrąįÅŖė┌╣▄└Ē╚╬䚥─┐žųŲ╚╬äšät░┤ā׎╚╝ē┼┼ĻĀŻ¼ĘųäeĘų┼õ▓╗═¼Ą─ā׎╚╝ēŻ¼ė╔ė┌Łh═ŌĄ─╚╬äšā׎╚╝ēŠ∙Ė▀ė┌╣▄└Ē╚╬䚯¼Łh═ŌĄ─╚╬äš┐╔ęįļSĢr═©▀^ā׎╚╝ēōīš╝Ą─╚╬äšš{Č╚ĘĮ╩ĮųąöÓŁhā╚Ą─╚╬äšł╠ąąŻ¼š╝ė├ŽĄĮy┘Yį┤ĪŻ «öėąČÓéĆ═¼Ą╚╝ēĄ─╚╬äš▀M╚ļ╚╬䚊═ŠwĻĀ┴ąĢr(╚ń┴Ń╝■╝ė╣żĢrČÓ▌SĄ─╬╗ų├┐žųŲ╚╬äš)Ż¼Ė∙ō■ĢrķgŲ¼▌å▐Dš{Č╚ĘĮ╩Įą╬│╔ą┬Ą─«öŪ░╚╬äšš{Č╚ŁhŻ¼▒ŻūC═¼ā׎╚╝ēĄ─╚╬äš▓ó░l▀MąąĪŻ ═¼└ĒŻ¼▀@ĘN╚╬䚥─ōīš╝║═š{Č╚ÖCųŲę▓▀mė├ė┌Ųõ╦¹▓╗═¼ā׎╚╝ēĄ─╚╬äšĪŻ
łD4 ╗∙ė┌VxW orksĄ─öĄ┐žŽĄĮy╚╬äšš{Č╚ÖCųŲ╩ŠęŌ
3 öĄ┐žŽĄĮyę²ī¦ą═Č■┤╬ķ_░lŲĮ┼_└Ēšō─Żą═Ą─蹊┐
ĪĪĪĪöĄ┐žŽĄĮyČ■┤╬ķ_░l╣”─▄Ą─ÅŖ╚§į┌ę╗Č©│╠Č╚╔Ž┤·▒Ē┴╦Ųõķ_Ę┼ąįĄ─║├ē─Ż¼Ė∙ō■ŪČ╚ļ╩ĮŽĄĮyĄ─ĮYśŗ─Ż╩ĮĪóįOėŗ╠ž³c║═öĄ┐žŽĄĮyĄ─╣”─▄╠žš„Ż¼▒Š╬─įOėŗ┴╦ę╗ĘN▀m║ŽŪČ╚ļ╩ĮöĄ┐žŽĄĮyĪóŠ▀ėąę²ī¦╣”─▄Ą─öĄ┐žŽĄĮyČ■┤╬ķ_░lŲĮ┼_Ą─└Ēšō─Żą═Ż¼╚ńłD5╦∙╩ŠĪŻ Č■┤╬ķ_░lŲĮ┼_▓╔ė├ę╗ĘNę²ī¦ķ_░lĄ──Ż╩ĮŻ¼ĮĶų·ė┌ŅAŽ╚Č©┴xĄ─Ė„ĘNą┼ŽóÄņŻ¼īó╩╣ė├╠ž╩ŌšZčį├Ķ╩÷Ą─ė├æ¶╣”─▄ę¬Ū¾▐DōQ│╔ą┼ŽóÄņųą╠žČ©▓▀┬įĄ─ĮM║ŽŻ¼╚╗║¾═©▀^┼cMCU ŽÓŲź┼õĄ─┤·┤aŠÄūgŲ„Ż¼īó▓▀┬į├Ķ╩÷ĘŁūg▓ó═©▀^ėŗ╦ŃÖCĄ─▓ó┐┌Įøė╔Ž┬▌dļŖ└|é„╦═ų┴öĄ┐žŽĄĮyĄ─Ę┬šµķ_░lĮė┐┌ĪŻ
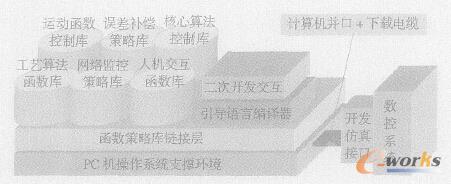
łD5 Č■┤╬ķ_░lŲĮ┼_Ą─└Ēšō─Żą═
ĪĪĪĪČ■┤╬ķ_░lŁhŠ│░³└©šZčį├Ķ╩÷║═ę²ī¦įOų├2ĘNķ_░lĘĮ╩ĮĪŻ šZčį├Ķ╩÷ĘĮ╩Į▓╔ė├ĮYśŗ╗»Ą─╣”─▄ÖCųŲŻ¼ŅAŽ╚Č©┴x│÷ŽĄĮyöUš╣Ą─╦ŃĘ©ĮYśŗŻ¼ė├æ¶ų╗ąĶĖ∙ō■╦ŃĘ©Ą─╠ß╩Š╝ė╚ļūį╝║╣”─▄ę¬Ū¾Ą─├Ķ╩÷ĪŻ Č■┤╬ķ_░lŲĮ┼_╠ß╣®¬Ü┴óĄ─ĮYśŗ╗»├Ķ╩÷šZčįŻ¼▓╔ė├├µŽ“ī”Ž¾Ą─ŠÄ│╠╦╝ŽļŻ¼ęį╣”─▄ī”Ž¾╚║ĮMĄ─śŗ│╔ĘĮ╩ĮüĒ═Ļš¹├Ķ╩÷öĄ┐žĮM╝■ī”Ž¾Ą─╠žČ©╣żū„ĀŅæBĪŻ šZčį├Ķ╩÷ĘĮ░ĖŻ¼┐╔ęį═©▀^ņ`╗ŅČ©┴xĄ─╦ŃĘ©ęÄĘČ╔Ņ╚ļŽĄĮyā╚▓┐Ą─▄ø╝■śŗ│╔╝Ü╣ØŻ¼▀mė├ė┌ŽĄĮyĄūīė▓▀┬įĘĮ░ĖĄ─ūįČ©┴x┼õų├ĪŻ ę²ī¦įOų├▓╔ė├ķ_░lŽ“ī¦Ą─ą╬╩ĮęįłDą╬╗»įāå¢Įń├µüĒČ©ųŲė├æ¶Ą─öUš╣ąĶŪ¾Ż¼ę╗░Ńė├ė┌▌^×ķ║åå╬Ą─öUš╣ķ_░lĪŻ
4 öĄ┐žŽĄĮyĄ─įOėŗīŹ¼F
ĪĪĪĪ│╔╣”┤ŅĮ©│÷┴╦ęįMC68F375+ MCX314×ķ╗∙ĄAĄ─ė▓╝■ķ_░lŲĮ┼_Ż¼ęÄäØ│÷┴╦ęįŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮy(RTOS)VxWorks×ķ║╦ą─Ą─īė┤╬╗»ŽĄĮy▄ø╝■¾wŽĄĮYśŗ║═╚╬äšš{Č╚ÖCųŲŻ¼ķ_░l│÷┴╦TDNCM4 öĄ┐žŽĄĮyįŁą═ÖCŻ¼įōŽĄĮy─▄ė├ė┌┐žųŲ▄ć┤▓ĪóŃ@ŃŖ┤▓Ż¼┐╔┐žųŲ4éĆ▀MĮo▌S║═1éĆ─ŻöMų„▌S╚²▌S┬ōäėŻ¼Š▀ėąų▒ŠĆ▓Õča║═ŲĮ├µłA╗Ī▓ÕčaĪó┬▌ą²ŠĆ▓Õča║═┐šķgłA╗Ī( C IP) ▓ÕčaĄ╚┐žųŲĘĮ╩ĮŻ¼─▄▀Mąą┬▌╝y╝ė╣żĪóūāŠÓ┬▌╝y╝ė╣żĄ╚Ż¼┐╔═©▀^Internet▀MąąöĄō■é„▌ö║═ŠWĮj╗»ųŲįņŻ¼▓óīóįōŽĄĮyæ¬ė├ė┌TDNC-M40A ╦─▌S╝ė╣żųąą─Ą─įOėŗ╔ŽŻ¼╚ńłD6 ╦∙╩ŠĪŻ ĮøīŹ“×ūC├„Ż¼įōöĄ┐žÖC┤▓╣żū„ĘĆČ©Ż¼ąį─▄┐╔┐┐Ż¼ų„▌S▐D╦┘ūŅĖ▀┐╔▀_6 000 r/m inŻ¼ŪąŽ„▀MĮoXĪóYĪóZ ┐╔▀_0~10 000mm /m inŻ¼Č©╬╗Š½Č╚XĪóYĪóZ ┐╔▀_? 0.005mmŻ¼ųžÅ═Č©╬╗Š½Č╚XĪóYĪóZ ┐╔▀_? 0.003 mmŻ¼─┐Ū░ęč▒╗æ¬ė├ė┌╠ņĮ“┤¾īWöĄūų╗»ųŲįņ┼c£y┐ž╝╝ąg蹊┐╦∙Ą─ę╗░ŃĮī┘ŪąŽ„╝ė╣ż║═╣żśI╠š┤╔╝ė╣żĄ─īŹ“×ĪŻ
łD6 TDNC-M40A╦─▌S╝ė╣żųąą─
5 ĮY šZ
ĪĪĪĪ▒ŠŽĄĮyįOėŗĄ─ūŅ┤¾╠ž³c╩ŪīóŪČ╚ļ╩Į╝╝ągæ¬ė├ĄĮöĄ┐žŽĄĮyĄ─įOėŗųąüĒŻ¼ßśī”╗∙ė┌PC Ą─öĄ┐žŽĄĮyį┌ĘĆČ©ąįĪóīŹĢrąįĄ╚ĘĮ├µĄ─▓╗ūŃŻ¼╠ß│÷└¹ė├┐žųŲąį─▄Ė³╝ėĘĆČ©║═ā׫ɥ─MCU ęį╝░▀\╦Ńąį─▄Ė³╝ėÅŖ┤¾Ą─īŻė├DSPąŠŲ¼Ż¼×ķļpCPU ╝▄śŗśŗĮ©ŪČ╚ļ╩ĮöĄ┐žŽĄĮyĄ─ė▓╝■ŲĮ┼_,└¹ė├ąį─▄ā׫ɥ─ŪČ╚ļ╩ĮīŹĢr▓┘ū„ŽĄĮyVxWo rksū„×ķöĄ┐žŽĄĮyĄ─▓┘ū„ŽĄĮyüĒĮyę╗š{Č╚ŽĄĮy▀\ąąĄ─Ė„éĆ╚╬䚯¼╩╣ŽĄĮyōĒėą┴╦Ė³╝čĄ─īŹĢrąį║═ĘĆČ©ąįŻ¼│§▓Į蹊┐┴╦öĄ┐žŽĄĮyę²ī¦ą═Č■┤╬ķ_░lŲĮ┼_Ą─└Ēšō─Żą═Ż¼ķ_░lįOėŗ│÷TDNCM4öĄ┐žŽĄĮyĄ─įŁą═ÖCŻ¼╠Į╦„│÷┴╦ę╗ŚlöĄ┐ž╝╝ąg蹊┐║═ķ_░lĄ─ą┬Ū■Ą└-ŪČ╚ļ╩ĮöĄ┐ž╝╝ągĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌ŪČ╚ļ╩Į╝╝ągĄ─öĄ┐žŽĄĮyķ_░lįOėŗ
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/support/11121515255.html