ĪĪĪĪį÷ÅŖ¼FīŹ╝╝ąg(Augmented RealityŻ¼║åĘQAR)╩Ū╠ōöM¼FīŹ╝╝ągĄ─ę╗éĆųžę¬Ęųų¦Ż¼╦³īó╠ōöMłDą╬ŁhŠ│┼c¼FīŹŁhŠ│╚┌×ķę╗¾wŻ¼╩╣ė├æ¶Å─Ėą╣┘╔Ž┤_ą┼╠ōöMŁhŠ│╩ŪŲõšµīŹŁhŠ│Ą─ĮM│╔▓┐ĘųĪŻį÷ÅŖ¼FīŹ╝╝ągĄ─╚²┤¾╠žąį╩Ū╠ōīŹĮY║ŽĪóīŹĢrĮ╗╗ź║═╚²ŠS│▀Č╚╔ŽĄ─Ųź┼õŻ¼▀@ų„ę¬═©▀^’@╩Š╝╝ągĪóĮ╗╗ź╝╝ągĪóČÓĘNé„Ėą╝╝ąg║═ėŗ╦ŃÖCłDą╬┼cČÓ├Į¾w╝╝ągĄ╚Ą─ĮY║ŽüĒīŹ¼FĪŻ
ĪĪĪĪ×ķ┴╦─▄«a╔·ėąÖC╚┌║ŽĄ─╠ōīŹł÷Š░Ż¼į÷ÅŖ¼FīŹŽĄĮyų„ꬹĶĮŌøQį÷ÅŖ¼FīŹŁhŠ│Ą─ęĢėXę╗ų┬ąįå¢Ņ}Ż¼░³└©Ż║Äū║╬ę╗ų┬ąįĪó▀\äėę╗ų┬ąįĪó╣ŌīWą¦╣¹ę╗ų┬ąį║═õų╚Š╝Ü╣ØĘų┼õĄ╚ĪŻ╦∙ų^Äū║╬ę╗ų┬ąįŻ¼Š═╩ŪųĖ¤ošōį┌╠ōöMŁhŠ│ųąņoų╣╗“┬■ė╬Ż¼īŹ¾wī”Ž¾Č╝æ¬┼c╝»│╔Ą─łDŽ±▒Ż│ų═ĖęĢĻPŽĄę╗ų┬ąįŻ╗Č°╦∙ų^▀\äėę╗ų┬ąįŻ¼Š═╩ŪųĖ«ö╠ōöMŁhŠ│ųąĄ─ī”Ž¾ū„│÷ųT╚ńŲĮęŲ╗“ą²▐DĄ╚▀\äėĢrŻ¼─Żą═Ą─│▀┤ń║═ęĢĮŪČ╝æ¬ļSĢr┼cņoų╣łDŽ±Į©┴óĄ─╠ōöMŁhŠ│▒Ż│ųę╗ų┬Ż╗╣ŌīWą¦╣¹ę╗ų┬ąįät╩ŪųĖ╠ōöMī”Ž¾Ą─ĻÄė░ĪóĖ▀╣ŌĄ╚╣ŌīWą¦╣¹æ¬┼cŁhŠ│▒Ż│ųę╗ų┬Ż¼Ųõ╗∙▒Š╦╝┬Ę╩Ū╩ūŽ╚╗ųÅ═│÷šµīŹł÷Š░Ą─╣Ōšš─Żą═Ż¼╚╗║¾į┘ėŗ╦Ńī”╠ōöMī”Ž¾Ą─ė░ĒæŻ¼╚ń├„░ĄĪóĻÄė░ĪóĘ┤╔õĄ╚Ż¼▀@═©│Żę¬į┌ł÷Š░ųąĘ┼ų├ńR├µĘ┤╔õ╬’¾w(╚ńńR├µŪ“Ą╚)ęį½@╚Ī╣Ōššą┼ŽóŻ¼╗“š▀ė├ĻÄė░═Č╔õģ^ė“Ą╚▀Mąą╣Ōšš╣└ėŗŻ╗õų╚Š╝Ü╣ØĘų┼õ╩ŪųĖłDŽ±ķgĪó─Żą═ī”Ž¾ķgĪóęį╝░łDŽ±┼c─Żą═ī”Ž¾ų«ķgõų╚ŠŠ½Č╚Ą─║Ž└ĒĘų┼õŻ¼ų„ę¬╩ŪäėæBęÄäØ└LųŲ╝Ü╣Ø╦«ŲĮĄ─å¢Ņ}Ż¼─┐Ū░į┌īŹļHARŽĄĮyųąąĶŪ¾▓╗Ė▀ĪŻ
ĪĪĪĪį÷ÅŖ¼FīŹŽĄĮyĄ─蹊┐ąĶ╔µ╝░įSČÓĻPµI╝╝ągŻ¼╚ń’@╩Š╝╝ągĪóĖ·█Öūóāį╝╝ąg(registration)ĪóĮń├µ┼c┐╔ęĢ╗»╝╝ąg║═ŽÓÖCś╦Č©(calibration)╝╝ągĄ╚ĪŻŲõųąŻ¼Ė·█Öūóāį╝╝ągøQČ©┴╦ŽĄĮyĄ─Äū║╬ę╗ų┬ąįŻ¼ĻPµIį┌ė┌╚ń║╬─▄Š½┤_ėŗ╦ŃīŹŠ░ŽÓÖCĄ─╬╗ų├║═ģóöĄŻ¼īó╠ōöMī”Ž¾ęį▀m«öĄ─┤¾ąĪ║═š²┤_š┌ō§ĻPŽĄ╝ė╚ļĄĮł÷Š░ųąĄ─▀m«ö╬╗ų├ĪŻį÷ÅŖ¼FīŹŽĄĮyĄ─ŠC║Žąį─▄ų„ę¬ė╔ŲõūóāįŠ½Č╚║═ŽĄĮyčė▀tüĒøQČ©Ż¼Ė∙ō■▓╗═¼Ą─ARæ¬ė├▒│Š░ėą▓╗═¼Ą─ąĶŪ¾ĪŻ
ĪĪĪĪ▒Š╬─╩ūŽ╚Įo│÷┴╦į÷ÅŖ¼FīŹŽĄĮyĄ─┐é¾wĮYśŗŻ¼╚╗║¾į┌┤╦╗∙ĄA╔Žųž³cšō╩÷┴╦’@╩Š╝╝ąg║═Ė·█Öūóāį╝╝ągĄ─ŽÓĻPĘĮĘ©╝░ŲõĖ„ūįĄ─╠žąį║═æ¬ė├ł÷║ŽŻ¼ūŅ║¾ī”į÷ÅŖ¼FīŹĄ─«öŪ░æ¬ė├║═╬┤üĒ┌ģä▌ū÷│÷┴╦Ė┼ę¬┐éĮYĪŻ
ĪĪĪĪ1Īóį÷ÅŖ¼FīŹŽĄĮyĄ─┐é¾wĮYśŗ
ĪĪĪĪ╚ńłD1╦∙╩ŠŻ¼ę╗éĆĄõą═Ą─į÷ÅŖ¼FīŹŽĄĮy═©│Żė╔ł÷Š░▓╔╝»ŽĄĮyĪóĖ·█ÖūóāįŽĄĮyĪó╠ōöMł÷Š░░l╔·Ų„Īó╠ōīŹ║Ž│╔ŽĄĮyĪó’@╩ŠŽĄĮy║═╚╦ÖCĮ╗╗źĮń├µĄ╚ČÓéĆūėŽĄĮyśŗ│╔ĪŻŲõųąŻ¼ł÷Š░▓╔╝»ŽĄĮyžōž¤½@╚ĪšµīŹŁhŠ│ųąĄ─ą┼ŽóŻ¼╚ń═ŌĮńŁhŠ│łDŽ±╗“ęĢŅlŻ╗Ė·█ÖūóāįŽĄĮyė├ė┌Ė·█Öė^▓ņė├æ¶Ą─Ņ^▓┐ĘĮ╬╗║═ęĢŠĆĘĮŽ“Ą╚Ż╗╠ōöMłDą╬└LųŲŽĄĮyžōž¤╔·│╔ę¬╝ė╚ļĄ─╠ōöMłDą╬ī”Ž¾Ż╗╠ōīŹ║Ž│╔ŽĄĮy╩ŪųĖ╠ōöMł÷Š░┼cšµīŹł÷Š░ī”£╩Ą─Č©╬╗įOéõ║═╦ŃĘ©ĪŻ
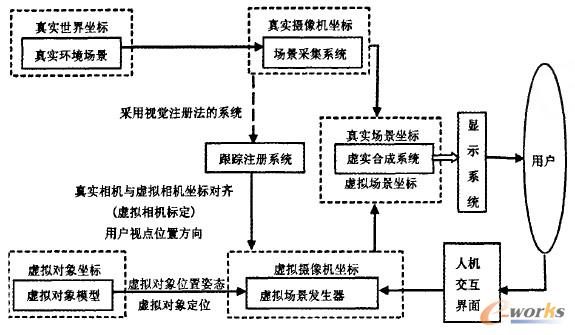
łD1 ÅŖ¼FīŹŽĄĮy╗∙▒Š╣”─▄ĮYśŗłD
ĪĪĪĪė╔łD1┐╔ų¬Ż¼į÷ÅŖ¼FīŹŽĄĮyųąŻ¼▌ö╚ļłDŽ±Įø▀^╠Ä└ĒĮM┐ŚĮ©┴óŲīŹŠ░┐šķgŻ¼ėŗ╦ŃÖC╔·│╔╠ōöMī”Ž¾ę└Äū║╬ę╗ų┬ąįŪČ╚ļīŹŠ░┐šķgųąŻ¼ą╬│╔╠ōīŹ╚┌║ŽĄ─į÷ÅŖ¼FīŹŁhŠ│Ż╗▀@éĆŁhŠ│į┘▌ö╚ļĄĮ’@╩ŠŽĄĮy│╩¼FĮoė├æ¶Ż╗ūŅ║¾ė├æ¶═©▀^Į╗╗źįOéõ┼cł÷Š░ŁhŠ│▀Mąą╗źäėĪŻŲõųąŻ¼ūī╠ōīŹ£╩┤_ĮY║ŽĄ─ūóāį▓Į¾EĘŪ│ŻĻPµIŻ¼║═ūŅ║¾Ą─’@╩Š▌ö│÷Č╦ę╗ŲŻ¼øQČ©┴╦ė├æ¶ī”ŁhŠ│Ą─ūŅĮKĖąų¬ą¦╣¹Ż¼╦∙ęįŽ┬├µīóųž³cī”▀@ā╔ĒŚ╝╝ąg▀Mąąįö╝Üšō╩÷ĪŻ
ĪĪĪĪ2Īóį÷ÅŖ¼FīŹŽĄĮyĄ─ĻPµI╝╝ąg
ĪĪĪĪ2.1’@╩Š╝╝ąg
ĪĪĪĪį÷ÅŖ¼FīŹŽĄĮyųąĄ─’@╩ŠŲ„┐╔ęįĘų×ķŅ^┐°’@╩ŠŲ„(HMD)║═ĘŪŅ^┐°’@╩ŠįOéõĪŻ─┐Ū░Ż¼ę╗░ŃĄ─į÷ÅŖ¼FīŹŽĄĮyų„ę¬╩╣ė├═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„ĪŻ═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„ų„ę¬ė╔╚²éĆ╗∙▒ŠŁh╣Øśŗ│╔Ż║╠ōöMą┼Žó’@╩Š═©Ą└ĪóšµīŹŁhŠ│’@╩Š═©Ą└ĪółDŽ±╚┌║Ž╝░’@╩Š═©Ą└ĪŻŲõųąŻ¼╠ōöMą┼ŽóĄ─’@╩ŠįŁ└Ē┼c╠ōöM¼FīŹŽĄĮy╦∙ė├Ą─Į■ø]╩ĮŅ^┐°’@╩ŠŲ„╗∙▒ŠŽÓ═¼Ż╗łDŽ±╚┌║Ž┼c’@╩Š═©Ą└╩Ū┼cė├æ¶Į╗╗źĄ─ūŅĮKĮė┐┌Ż¼Ė∙ō■ŲõųąšµīŹŁhŠ│Ą─▒Ē¼FĘĮ╩ĮŻ¼┐╔Ęų×ķ╗∙ė┌CCDözŽ±įŁ└ĒĄ─ęĢŅl═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„║═╗∙ė┌╣ŌīWįŁ└ĒĄ─╣ŌīW═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„ā╔ŅÉĪŻ
ĪĪĪĪęĢŅl═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„╩ūŽ╚ė╔░▓čbį┌Ņ^┐°╔ŽĄ─ā╔éĆ╬óą═CCDözŽ±ÖCöz╚Ī═Ō▓┐ŁhŠ│Ą─łDŽ±Ż¼╚╗║¾īóėŗ╦ŃÖCłDą╬īW╔·│╔Ą─ą┼Žó╗“łDŽ±»B╝ėį┌özŽ±ÖCęĢŅl╔ŽŻ¼═©▀^ęĢŅlą┼╠¢╚┌║ŽŲ„īŹ¼Fėŗ╦ŃÖC╔·│╔Ą─╠ōöMł÷Š░┼cšµīŹł÷Š░╚┌║ŽŻ¼ūŅ║¾═©▀^’@╩ŠŽĄĮy│╩¼FĮoė├æ¶ĪŻ╣ŌīW═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„ät═©▀^ę╗ī”░▓čbį┌č█Ū░Ą─░ļ═Ė░ļĘ┤Ą─╣ŌīW║Ž│╔Ų„īŹ¼Fī”šµīŹŁhŠ│┼c╠ōöMą┼ŽóĄ─╚┌║ŽŻ║šµīŹł÷Š░ų▒Įė═Ė▀^░ļĘ┤░ļ═ĖńR│╩¼FĮoė├æ¶Ż¼Įø▀^╣ŌīWŽĄĮyĘ┼┤¾Ą─╠ōöMł÷Š░Įø░ļĘ┤░ļ═ĖńRĘ┤╔õČ°▀M╚ļč█Š”ĪŻ
ĪĪĪĪęĢŅl═ĖęĢ╩Į║═╣ŌīW═ĖęĢ╩ĮHMDį┌ūóāįŠ½Č╚ĪóŽĄĮyčė▀tĪóšµīŹł÷Š░Ą─Ęų▒µ┬╩║═╩¦šµĪóęĢł÷Ą╚ĘĮ├µČ╝ėą▓╗═¼▒Ē¼FĪŻ╣ŌīW═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„ī”šµīŹŁhŠ│Äū║§¤oōp’@╩ŠŻ¼ė├涽@Ą├Ą─ą┼Žó▒╚▌^┐╔┐┐╚½├µŻ¼Ą½šµīŹŁhŠ│┼c╠ōöMłDŽ±Ą─╚┌║Ž└¦ļyŻ╗ęĢŅl═ĖęĢ╩ĮŅ^┐°’@╩ŠŲ„ī”šµīŹŁhŠ│Ą─Å═¼F╩▄ĄĮ║▄ČÓę“╦žĄ─Ž▐ųŲŻ¼Ą½šµīŹŁhŠ│┼c╠ōöMłDŽ±Ą─╚┌║Žģs╚▌ęū┴╦║▄ČÓĪŻ
ĪĪĪĪĘŪŅ^┐°╩ĮĄ─’@╩ŠįOéõę╗░Ń░³└©╩ų│ų’@╩ŠŲ„(Hand-Held Displays)ĪóCRT╗“ŲĮ├µLCD’@╩ŠŲ„Īó═Čė░│╔Ž±ŽĄĮyĪóūįė╔┴ó¾w’@╩ŠŲ„ęį╝░ę╗ą®╠ž╩Ōł÷║ŽīŻė├Ą─’@╩ŠįOéõĪŻŲõųą▌^╠žäeĄ─ėąŅ^┤„╩Į═Čė░Ų„Īóč█ńR╩Į’@╩ŠŲ„║═ęĢŠW─ż═Čė░’@╩ŠĄ╚ĪŻ
ĪĪĪĪį┌īŹļHæ¬ė├ųąŻ¼’@╩ŠįOéõĄ─▀xė├ų„ę¬ę└ō■▀\ė├Ą─ŁhŠ│║═╚╬äšČ°Č©Ż║ę╗░ŃšfüĒŻ¼Ņ^┐°╩Į’@╩ŠįOéõ╩▄ŁhŠ│╝s╩°▌^ąĪŻ¼╩ęā╚æ¶═ŌŠ∙┐╔ęį╩╣ė├Ż¼įOéõārĖ±▀mųąŻ¼│┴Į■Ėą▌^║├Ż╗ĘŪŅ^┐°╩ĮĄ─’@╩ŠįOéõę╗░Ń│╔▒Š▌^Ė▀(│²ę╗░ŃĄ─CRT╗“LCD’@╩ŠŲ„ęį═Ō)Ż¼┐╔ČÓ╚╦╣▓ŽĒŻ¼╩╣ė├ąį─▄ĘĆČ©Īóē█├³▌^ķLŻ¼Č°Ūę├Ō│²┴╦╩╣ė├š▀ė╔ė┌ĦŅ^┐°’@╩ŠįOéõČ°įņ│╔Ą─▓╗▀m┼cŲŻä┌ĖąĪŻ
ĪĪĪĪ2.2Ė·█Öūóāį╝╝ąg
ĪĪĪĪį÷ÅŖ¼FīŹŽĄĮyĄ─Ė·█Öūóāį░³║¼╩╣ė├š▀Ņ^▓┐(özŽ±ÖC)Ą─┐šķgČ©╬╗Ė·█Ö║═╠ōöM╬’¾wį┌šµīŹ┐šķgųąĄ─Č©╬╗ā╔éĆĘĮ├µĄ─ā╚╚▌Ż¼ĻPŽĄĄĮ╠ōöM║═šµīŹī”Ž¾Ą─┼õ£╩Īó┼┼┴ąĪŻī”ė├æ¶Ņ^▓┐ŽÓī”╬╗ų├║═ęĢŠĆĘĮŽ“Ą─½@╚Īę╗░Ń┐╔Ęų×ķā╔ĘNŻ║ę╗ĘN╩Ū▓╔ė├Ė·█Öé„ĖąŲ„▀MąąūóāįŻ¼║åĘQĖ·█ÖŲ„Ę©Ż╗ę╗ĘN╩Ū▓╔ė├ėŗ╦ŃÖCęĢėXŽĄĮyĮY║Ž╠žČ©╦ŃĘ©üĒīŹĢrĄ├ĄĮŻ¼║åĘQęĢėXĘ©ĪŻį┌īŹļHæ¬ė├ųąŻ¼ė╔ė┌▀@ā╔ĘNĘĮĘ©Ė„ėąŲõā×╚▒³cŻ¼×ķ┴╦Ą├ĄĮĖ³ÅVĘ║Ą─▀mæ¬ąį║═Ė³║├Ą─ąį─▄Ż¼įSČÓŽĄĮy▓╔ė├īóā╔š▀ŽÓĮY║ŽĄ─Å═║ŽĘĮĘ©ĪŻ┤╦═ŌŻ¼▀Ćėą╗∙ė┌šJų¬(Knowledge Based)Ą─ĘĮĘ©Ż¼įōĘ©═©▀^į┌ė├æ¶Ņ^▓┐║═ŽÓĻPī”Ž¾ĻPµI▓┐╬╗░▓čb╚²ŠSĖ·█ÖŲ„üĒīŹ¼FŻ¼Ą½ę“×ķę¬╩┬Ž╚┴╦ĮŌī”Ž¾ĮYśŗ▓ó░▓čbĖ·█ÖŲ„Ż¼╩╣ų«æ¬ė├ĘČć·╩▄ĄĮŽ▐ųŲŻ¼▒Š╬─ųą▓╗ū„ĮķĮBĪŻ
ĪĪĪĪ2.2.1╗∙ė┌Ė·█ÖŲ„Ą─ūóāį
ĪĪĪĪ╗∙ė┌Ė·█ÖŲ„Ą─ūóāįĘĮĘ©Ųš▒ķ▓╔ė├æTąįĪó│¼┬Ģ▓©ĪóļŖ┤┼Īó╣ŌīWĪó¤oŠĆļŖ▓©╗“ÖCąĄčbų├Ą╚▀MąąĖ·█ÖĪŻŲõųąŻ¼æTąįī¦║Įčbų├═©▀^æTąįįŁ└ĒüĒ£yČ©╩╣ė├š▀Ą─▀\äė╝ė╦┘Č╚Ż¼═©│Ż╦∙ųĖĄ─æTąįčbų├░³└©═ė┬▌āx║═╝ė╦┘Č╚ėŗŻ╗│¼┬Ģ▓©ŽĄĮy└¹ė├£y┴┐Įė╩ščbų├┼c3éĆęčų¬│¼┬Ģ▓©į┤Ą─ŠÓļxüĒ┼ąöÓ╩╣ė├š▀╬╗ų├Ż╗ļŖ┤┼čbų├═©▀^Ėąæ¬ŠĆ╚”Ą─ļŖ┴„ÅŖ╚§üĒ┼ąöÓė├æ¶┼c╚╦įņ┤┼ł÷ųąą─Ą─ŠÓļxŻ¼╗“└¹ė├ĄžŪ“┤┼ł÷┼ąöÓ─┐ś╦Ą─▀\äėĘĮŽ“Ż╗╣ŌīWŽĄĮy╩╣ė├CCDé„ĖąŲ„Ż¼═©▀^£y┴┐Ė„ĘN─┐ś╦ī”Ž¾║═╗∙£╩╔Ž░▓čbĄ─LED░l│÷Ą─╣ŌŠĆüĒ£y┴┐─┐ś╦┼c╗∙£╩ų«ķgĄ─ĮŪČ╚Ż¼▓ó═©▀^įōĮŪČ╚ėŗ╦ŃęŲäė─┐ś╦Ą─▀\äėĘĮŽ“║═ŠÓļxŻ╗ÖCąĄčbų├ät╩Ū└¹ė├ŲõĖ„╣سcå¢Ą─ķLČ╚║═╣سc▀BŠĆķgĄ─ĮŪČ╚Č©╬╗Ė„éĆ╣سcĪŻ▀@ą®Ė·█Ö╝╝ąg╣▓═¼Ą─å¢Ņ}Š═╩Ūūį╔Ēæ¬ė├ŅIė“Ą─ŠųŽ▐ąįĪŻ└²╚ńŻ¼ļŖ┤┼Ė·█ÖŲ„ų╗─▄į┌╩┬Ž╚ŅAéõĄ─┤┼ł÷╗“┤┼ąįę²ī¦ŁhŠ│Ž┬╣żū„Ż╗GPS║═ļŖ┤┼Ė·█ÖČ╝▓╗ē“Š½┤_Ż¼ÖCąĄĖ·█ÖŽĄĮy▒┐ųž▓╗┐░Ż╗▀mė├ė┌╩ęā╚Ą─Ė·█ÖŽĄĮy▓╗ę╗Č©─▄į┌æ¶═Ōš²│Ż░lō]ū„ė├Ą╚Ą╚ĪŻ┐éų«Ż¼ø]ėą═Ļ├└Ą─▀xō±ĪŻę“Č°ī”į÷ÅŖ¼FīŹŽĄĮyüĒšf▓óø]ėąå╬ę╗═Ļ├└Ą─Ė·█ÖĮŌøQĘĮ░ĖŻ¼Ė·█ÖŽĄĮy┐╔ęįĮY║ŽŲõųąĄ─ā╔╚²ĘNĖ·█Öé„ĖąŲ„ęįŽÓ╗źčaāö┤¾čėĢrĪóĄ═╦óą┬┬╩╔§ų┴Ģ║ĢrĄ─╩¦ą¦ĪŻ
ĪĪĪĪ╚╗Č°Ż¼ī”ė┌ę╗éĆīŹļHĄ─į÷ÅŖ¼FīŹŽĄĮyŻ¼āHāHĖ∙ō■Ņ^▓┐Ė·█ÖŽĄĮy╠ß╣®Ą─ą┼ŽóŻ¼ŽĄĮyø]ėąĘ┤üļyęį╚ĪĄ├ūŅ╝čŲź┼õŻ╗Č°ŪęĖ·█ÖŲ„Ę©Ą─Š½Č╚║═╩╣ė├ĘČć·Č╝▓╗─▄ØMūŃį÷ÅŖ¼FīŹĄ─ąĶ꬯¼ėų╚▌ęū╩▄ĄĮ═ŌĮńĖ╔ö_Ż¼ę“Č°Äū║§▓╗┐╔─▄å╬¬Ü╩╣ė├Ż¼═©│Ż┼cŽ┬├µīóę¬ĮķĮBĄ─ęĢėXūóāįĘĮĘ©ĮY║ŽŲüĒīŹ¼FĘĆČ©Ą─Ė·█ÖĪŻ
ĪĪĪĪ2.2.2ęĢėXĖ·█Öūóāį
ĪĪĪĪ─┐Ū░Ż¼ęĢėXĖ·█Öūóāįų„ę¬ėą╗∙£╩³cĘ©Īó─Ż░µŲź┼õĘ©ĪóĘ┬╔õūāōQĘ©║═╗∙ė┌▀\äėłDŽ±ą“┴ąĄ─ĘĮĘ©Ą╚ĪŻ
ĪĪĪĪŲõųąŻ¼╗∙£╩³cĘĮĘ©ąĶ╩┬Ž╚ī”ŽÓÖC▀MąąČ©ś╦(½@╚Ī4éĆā╚▓┐ģóöĄ)Ż¼▓óįOų├ŽÓæ¬Ą─ś╦ėø╗“╗∙£╩³cŻ¼╚╗║¾ī”½@╚ĪĄ─łDŽ±▀MąąĘų╬÷Ż¼ęįėŗ╦ŃŽÓÖCĄ─╬╗ų├║═ū╦æB(½@╚Ī6éĆ═Ō▓┐ģóöĄ)ĪŻŲõįŁ└Ē╩ŪŽ╚Å─łDŽ±ųą╠ß╚Īę╗ą®ęčų¬Ą─ī”Ž¾╠žš„³cŻ¼šęĄĮšµīŹŁhŠ│║═łDŽ±ųąī”欳cĄ─ŽÓĻPąįŻ¼╚╗║¾ė╔ŽÓĻPąįėŗ╦Ń│÷ī”Ž¾ū╦æBŻ¼▀@éĆ▀^│╠ę▓Š═╩Ūī”Å─╩└Įńū°ś╦▐DōQĄĮözŽ±ÖCū°ś╦Ą──Żą═ęĢłDŠžĻćĄ─Ū¾ĮŌ▀^│╠ĪŻ═©│ŻŻ¼╠žš„³c┐╔ęįė╔┐ūČ┤Īó╣š³c╗“╚╦×ķįOų├Ą─ś╦ėøüĒ╠ß╣®ĪŻŲõųąŻ¼ī”ė┌╚╦×ķś╦ėøĄ─╠žš„³cŻ¼╚¶░┤ššŅü╔½äØĘųätėą║┌░ū┼c▓╩╔½ā╔ĘNŪķørŻ¼Č°░┤ššą╬ĀŅäØĘųätėąłAą╬Īó═¼ą─łAŁhĪóČÓ▀ģą╬(░³└©╚²ĮŪą╬ĪóĘĮą╬Īó╬Õ▀ģą╬Ą╚)║═Ślą╬┤aĄ╚ĪŻ║┌░ūś╦ųŠ┐╔į┌łDŽ±Č■ųĄ╗»║¾ė├ŽÓæ¬╦ŃĘ©╠ß╚ĪŻ¼ŽÓī”üĒšf▓╩╔½ś╦ųŠ═©▀^╔½▓╩Ęų┴┐╠ß╚ĪĖ³╚▌ęūŻ¼Ą½═¼Ģrę▓ęū╩▄ĄĮ╣ŌššŚl╝■ĪóŽÓÖC▒Š╔Ē┘|┴┐║═ė^▓ņĮŪČ╚ĘĮŽ“Ą╚Ą─ė░ĒæŻ╗łAą╬║══¼ą─łAŁh╗∙ė┌▒Š╔ĒÄū║╬╠žąįī”ė^▓ņĘĮŽ“Ą─Ė─ūā║▄ĘĆČ©Ż¼Ą½╩Ūė├ė┌ū„×ķ╠žš„³cĄ─ųąą─╬╗ų├Š═▌^ļyęįŠ½┤_┤_Č©Ż╗ČÓ▀ģą╬ś╦ėø▓╔ė├╣šĮŪū„×ķ╠žš„³cŻ¼╬╗ų├ą┼ŽóĖ³×ķŠ½┤_Ż¼Ą½═∙═∙ąĶę¬Ņ~═Ō═ŠÅĮ╗“ą┼Žóęį╩╣Ė„╣šĮŪ╠žš„³cŽÓ╗źģ^äeŻ¼Č°ŪęČÓ▀ģą╬ĘĮĘ©į┌ś╦ėø▓┐Ęų╩▄ĄĮš┌ō§ĢrŠ═┐╔─▄Ģ■ė╔ė┌╠žš„³cöĄ┴┐Ą─╚▒╩¦Č°╩¦ą¦ĪŻ
ĪĪĪĪĖ∙ō■╦∙╩╣ė├özŽ±ÖCĄ─öĄ┴┐▓╗═¼Ż¼╗∙£╩³cĘĮĘ©ėų┐╔Ęų×ķ╗∙ė┌ę╗éĆözŽ±ÖCĄ─å╬özŽ±ÖCĘ©║═ļpözŽ±ÖCĄ─┴ó¾węĢėXĘ©ĪŻī”å╬özŽ±ÖCĘ©üĒšfŻ¼ų┴╔┘ąĶę¬4éĆ╠žš„³cŻ¼ę“Č°│Ż▓╔ė├ĘĮą╬ś╦ėøŻ╗┴ó¾węĢėXĘ©ätąĶ3éĆ╠žš„³cŠ═┐╔┤_Č©Ż¼ę“┤╦įŁ└Ē╔Ž▓╔ė├╚²ĮŪą╬╝┤┐╔Ż¼Ą½│÷ė┌ī”š┌ō§¶ö░¶ąįĄ─┐╝æ]ėąĢrę▓Ģ■▓╔ė├ĘĮą╬ś╦ėøĪŻ┴ó¾węĢėXį┌ī”╠žš„³cöĄ┴┐Ą─ę¬Ū¾╔ŽĖ³Š▀ā×ä▌Ż¼▓óŪę┐╔ęį═¼ĢrÅ─łDŽ±ęĢ▓Ņųą½@╚Īł÷Š░╔ŅČ╚ą┼ŽóŻ¼Ą½įōĘ©Ęų▒µ┬╩▓╗Ė▀ĪóČ©╬╗Š½Č╚▓╗ē“ĪóŽÓÖCų«ķg╗∙ŠĆČ╠Ūęūóāį╔ŅČ╚ėąŽ▐Ż╗ę“┤╦å╬ŽÓÖCĘĮĘ©ļm╚╗ąĶę¬ų┴╔┘4éĆ╠žš„³cŻ¼ģsęįąį─▄▒Ē¼F│╔×ķ┴╦ūóāįĘĮĘ©Ą─╩ū▀xŻ╗┴ó¾węĢėXĘ©ät┐╔ū„×ķī”å╬ŽÓÖCĘĮĘ©╠ßĖ▀ĘĆČ©ąįĄ─Ņ~═Ōča│õ░lō]ųžę¬ū„ė├ĪŻ
ĪĪĪĪ─Ż░µŲź┼õĘ©═¼śėąĶę¬╩┬Ž╚ī”ŽÓÖCś╦Č©ā╚▓┐ģóöĄŻ¼į┘═©▀^łDŽ±Ęų╬÷╠Ä└Ē╠ß╚ĪŁhŠ│ųąŲĮ├µ╔ŽĄ─╠žČ©łDą╬łD░ĖŻ¼▓ó┼cęčėą─Ż╩Į▀MąąŲź┼õŻ¼Ųź┼õ│╔╣”╝┤┐╔┤_Č©įōłD░Ė░ÕĄ─╬╗ų├║═ū╦æBŻ¼ę“Č°┤_ȩꬻB╝ėį┌łD░Ė░Õ╔Ž╠ōöMī”Ž¾Ą─╬╗ų├║═ū╦æBĪŻ─Ż░µŲź┼õĘ©Ą─Ąõą═┤·▒Ē╩ŪARToolKitĪŻ─┐Ū░Ż¼▓╔ė├ARToolKitķ_░lĄ─ŽĄĮyėą║▄ČÓŻ¼└²╚ńMagicBookĄ╚ĪŻ─Ż░µŲź┼õĘ©Ą─ā׳c╩ŪĘĮ▒Ń┐ņ╦┘Ż¼╩╣ė├Ųš═©PCÖC║═özŽ±ÖC╝┤┐╔īŹ¼F║▄Ė▀Ą─ļŅlŻ¼ī”┐ņ╦┘Ą─▀\äėę▓▀mė├Ż╗╚▒³c╩Ū¶ö░¶ąį▓╗ē“Ż¼ų╗ę¬ī”łD░Ė╔įėąš┌ō§Š═ļyęįėąą¦▀\ū„Ż¼ę“┤╦¤oĘ©Į³ŠÓļxė^▓ņ┼cłD░Ė░ÕŽÓ▀BĄ─╠ōöM╬’¾w╗“š▀ė├īŹļH╬’¾w┼cų«▀MąąęŲäėĮ╗╗źĪŻ
ĪĪĪĪßśī”Å═ļsĄ─ŽÓÖCś╦Č©Ż¼ėąčąŠ┐ų┬┴”ė┌║å╗»╔§ų┴├Ō│²įō▀^│╠Ż¼│÷¼F┴╦░ļūįäė║═ūįäėś╦Č©╝░¤oąĶś╦Č©Ą─ĘĮĘ©Ż¼░ļūįäė║═ūįäėś╦Č©ę╗░Ń└¹ė├╚▀ėÓĄ─é„ĖąŲ„ą┼Žóūįäė£y┴┐║═čaāöś╦Č©ģóöĄĄ─ūā╗»Ż╗Č°¤oąĶś╦Č©Ą─ĘĮĘ©ätęįĘ┬╔õūāōQ║═▀\äėłDŽ±ą“┴ąĘ©×ķ┤·▒ĒĪŻ
ĪĪĪĪĘ┬╔õūāōQĘ©▓╗ąĶę¬özŽ±ÖC╬╗ų├ĪóŽÓÖCā╚▓┐ģóöĄ║═ł÷Š░ųą╗∙£╩ś╦ųŠ³c╬╗ų├Ą╚ŽÓĻPŽ╚“׹┼ŽóĪŻĘ┬╔õĘ©═©▀^īó╬’¾wū°ś╦ŽĄĪóŽÓÖCū°ś╦ŽĄ║═ł÷Š░ū°ś╦ŽĄ║Ž▓óŻ¼Į©┴óę╗éĆ╚½ŠųĘ┬╔õū°ś╦ŽĄ(ĘŪÜWÄū└’Ą├ū°ś╦ŽĄ)üĒīóšµīŹł÷Š░ĪóŽÓÖC║═╠ōöM╬’¾wČ©┴xį┌═¼ę╗ū°ś╦ŽĄŽ┬Ż¼ęį└@ķ_▓╗═¼ū°ś╦ŽĄų«ķg▐DōQĻPŽĄĄ─Ū¾ĮŌå¢Ņ}Ż¼Å─Č°▓╗į┘ę└┘ćė┌ŽÓÖCČ©ś╦ĪŻ▀@ĘNĘĮĘ©Ą─╚▒³c╩Ū▓╗ęū½@Ą├£╩┤_Ą─╔ŅČ╚ą┼Žó║═īŹĢrĖ·█Öū„×ķĘ┬╔õū°ś╦ŽĄ╗∙£╩Ą─łDŽ±╠žš„³cĪŻ
ĪĪĪĪ╗∙ė┌łDŽ±ą“┴ąĄ─ĘĮĘ©╩Ū└¹ė├═Čė░Äū║╬ĘĮĘ©Å─łDŽ±ą“┴ąųąųžśŗ╚²ŠSī”Ž¾Ż¼─┐Ū░ęč┐╔ęį▌^║├Ąžųžśŗę╗ą®║åå╬Ą─▒Ē├µīŹ¾wĪŻ┤µį┌Ą─å¢Ņ}╩ŪŻ¼¼Fėą╗∙ė┌łDŽ±ą“┴ąųžśŗ╚²ŠSī”Ž¾Ą─╝╝ągųąŻ¼╠žš„³cĄ─╠ß╚Ī═Ļ╚½╗∙ė┌łDŽ±╠žš„▀MąąŻ¼╔┘┴┐Ė▀┐╔┐┐ąįĄ─╠žš„³c▒žĒÜė╔┤¾┴┐╠žš„³c═©▀^Å═ļsĄ─Ųź┼õ║═Ą³┤·ėŗ╦ŃĄ├ĄĮŻ¼ę“┤╦ļyęį▒ŻūCė^▓ņęĢ³c╬╗ų├½@╚ĪĄ─īŹĢrąįĪŻ
ĪĪĪĪŠ═─┐Ū░Č°čįŻ¼╗∙ė┌ęĢėXĄ─į÷ÅŖ¼FīŹŽĄĮy┐╔╩╣£y┴┐š`▓ŅŠųŽ▐į┌ęįŽ±╦ž×ķå╬╬╗Ą─łDŽ±┐šķgĘČć·ā╚Ż¼ę“Č°╩ŪĮŌøQį÷ÅŖ¼FīŹųą╚²ŠSūóāįå¢Ņ}ūŅėąŪ░═ŠĄ─ĘĮĘ©ĪŻĄ½═¼Ģr蹊┐▒Ē├„Ż¼£╩┤_┐ņ╦┘Ą─Ė·█Öūóāįį┌ŁhŠ│ųąėąŠ½┤_═Ō▓┐ģó┐╝³cĄ─ŪķørŽ┬Ż¼▒╚į┌Å═ļsĄ─æ¶═ŌšµīŹ╩└Įńųą╚▌ęūīŹ¼FĄ├ČÓŻ╗į┌æ¶═ŌŪķørŽ┬Ż¼ąĶę¬╩╣ė├ĮY║Ž┴╦╗∙ė┌Ė·█ÖŲ„ĘĮĘ©Ą─Å═║ŽūóāįĘ©ĪŻ
ĪĪĪĪ2.2.3Å═║ŽūóāįĘ©
ĪĪĪĪę╗░ŃĄ─ęĢėXĖ·█ÖūóāįĘ©ļm╚╗Š½┤_ąįĖ▀Ż¼Ą½×ķ┴╦┐sČ╠łDŽ±Ęų╬÷╠Ä└ĒĄ─ĢrķgŻ¼│Żę└┘ćė┌ļķg▀B└mąįŻ¼«öŽÓÖC┼cī”Ž¾ķgŽÓī”▀\äė╦┘Č╚▌^┤¾ĢrŠ═Ģ■šę▓╗ĄĮ╠žš„³cŻ╗┴Ē═ŌŻ¼ęĢėXĖ·█ÖūóāįĘ©į┌ŁhŠ│▓╗Ę¹║Žę¬Ū¾(└²╚ńś╦ėø▒╗š┌ō§╗“╣Ōšš▓╗ūŃ)ĢrĢ■╩¦ą¦Ż¼ĘĆČ©ąį▓╗ē“║├ĪŻČ°Ė·█Öé„ĖąŲ„╚ńļŖ┤┼Ė·█ÖĄ╚ļm╚╗Š½┤_ąį▓╗Ė▀Ż¼ėųėąę╗Č©čė▀tŻ¼Ą½¶ö░¶ąį║═ĘĆČ©ąį▓╗ÕeŻ¼Č°Ūęī”ė├æ¶▀\äėĄ─Ž▐ųŲę▓▌^ąĪĪŻę“┤╦Ż¼ĮY║ŽęĢėXĘ©║═╗∙ė┌Ė·█ÖŲ„Ą─ĘĮĘ©┐╔ęį╚ĪķLčaČ╠Ż║═©│Ż╩ŪŽ╚ė╔Ė·█Öé„ĖąŲ„┤¾Ė┼╣└ėŗ╬╗ų├ū╦æBŻ¼į┘═©▀^ęĢėXĘ©▀Mę╗▓ĮŠ½┤_š{š¹Č©╬╗ĪŻę╗░Ń▓╔ė├Ą─Å═║ŽĘ©ėąęĢėX┼cļŖ┤┼Ė·█ÖĮY║ŽĪóęĢėX┼cæTī¦Ė·█ÖĮY║ŽĪóęĢėX┼cGPSĖ·█ÖĮY║ŽĄ╚ĪŻ
ĪĪĪĪļŖ┤┼Ė·█ÖĘ©▒Ńöyąį║├Ż¼Ą½ęū╩▄ĄĮŁhŠ│ųąĮī┘╬’¾wĄ─ė░ĒæŻ¼Š½Č╚▓╗ē“Ė▀Ż╗┼cęĢėXĘ©ĮY║Ž┐╔ęįŲĄĮ╝ė╦┘łDŽ±Ęų╬÷▀^│╠ĪóÅ─ČÓ▀xųą┤_Č©š²ĮŌĪóū„×ķ║¾éõĘĆČ©Ė·█Ö║═×ķęĢėXĘ©╠ß╣®ī”▒╚ģóššĮY╣¹Ą╚ū„ė├ĪŻæTąįĖ·█Öā׳c╩Ūčė▀tąĪ╦┘Č╚┐ņŻ¼╚▒³c╩Ūš`▓Ņ└█Ęeą¦æ¬▓óĢ■ė░ĒæūóāįĘĆČ©ąįŻ╗┼cęĢėXĘ©ĮY║Ž║¾┐╔ęįŅA£yŲĮ├µś╦ėøĄ─┤¾Ė┼▀\äėĘČć·▓óį÷╝ėŽĄĮy¶ö░¶ąį║═ąį─▄▒Ē¼FŻ¼ęĢėXĘ©ätžōž¤Šų▓┐łDŽ±Ęų╬÷ęįŠ½┤_Č©╬╗▓óŽ¹│²é„ĖąŲ„Ą─└█ĘeŲ»ęŲ┴┐ĪŻ
ĪĪĪĪ3ĪóĮYšō║═š╣═¹
ĪĪĪĪį┌ć°═ŌŻ¼į÷ÅŖ¼FīŹįńęčį┌ßtīWĪó▀b▓┘ū„ĪóųŲįņ┼cŠSą▐Īó┐╔ęĢ╗»┼cĮ╠ė²┼Óė¢ĪóŖ╩śĘĪó▄Ŗ╩┬ė¢ŠÜĄ╚ŅIė“╚ĪĄ├┴╦│╔╣”æ¬ė├ĪŻį┌ć°ā╚Ż¼▓╗╔┘å╬╬╗║═éĆ╚╦ī”į÷ÅŖ¼FīŹųąĄ─ĻPµI╝╝ąg║═╦ŃĘ©▀Mąą┴╦蹊┐Ż¼▓óŪęęįč└┐ŲßtīWĪóįOéõŠSą▐Ą╚įSČÓ▒│Š░Ą├ĄĮ┴╦│§▓Įæ¬ė├蹊┐Ż¼ė╚Ųõį┌▒▒║ĮĄ─ÖCąĄ╩ų▀b▓┘ū„╔ŽĄ├ĄĮ┴╦│╔╣”æ¬ė├ĪŻĄ½ć°ā╚Ą─蹊┐─┐Ū░╚įČÓŽ▐ė┌īŹ“×ļAČ╬Ż¼┼cć°═ŌĄ─æ¬ė├╦«ŲĮ▀Ćėąę╗Č©ŠÓļxĪŻ
ĪĪĪĪ─┐Ū░Ż¼ļSų°į÷ÅŖ¼FīŹĄ─┐ņ╦┘░lš╣Ż¼│÷¼F┴╦įSČÓą┬Ą─蹊┐ĘĮŽ“Ż¼╚ńą┬Ą─’@╩ŠĘĮ╩ĮĪóššŲ¼šµīŹĖąłDą╬└LųŲĪóš{╣ؼFīŹ(Mediated/Diminished Reality)Īó╗∙ė┌ŠWĮjĄ─į÷ÅŖ¼FīŹ║═ßśī”æ¶═ŌļS╔Ēį÷ÅŖ¼FīŹŽĄĮyĄ─╝╝ągĄ╚Ą╚ĪŻŲõųą╔µ╝░ĄĮĄ─╝╝ąg░³└©╗∙ė┌łDŽ±Ą─└LųŲ(IBMR)ĪóČÓ═©Ą└ą┼Žó╚┌║ŽĪóŲš▀mėŗ╦Ń╝╝ągĪó’@╩ŠįOéõ║═Ė·█ÖįOéõĄ─ļS╔Ē▒Ńöy╗»Ą╚ĪŻļSų°ŽĄĮyąį─▄Ą─╠ßĖ▀Īó▓┘ū„▀^│╠Ą─║å╗»║═įOéõ│╔▒ŠĄ─ĮĄĄ═Ż¼į÷ÅŖ¼FīŹĢ■į┌įĮüĒįĮČÓĄ─ŅIė“Ą├ĄĮÅVĘ║æ¬ė├ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║į÷ÅŖ¼FīŹŽĄĮy╝░ŲõĻPµI╝╝ąg蹊┐
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/support/11121514954.html