į┌┴Ń▓┐╝■Ą─čb┼õ▀^│╠ųąŻ¼╚ń╣¹┤²čb┼õ╝■─▄į┌čb┼õ▀^│╠ųąūįäė(d©░ng)Ė─ūā│▀┤ńęį▀mæ¬(y©®ng)ŽÓæ¬(y©®ng)čb┼õ╗∙╝■Ą─│▀┤ńŻ¼╚ń░čę╗éĆ(g©©)▌S╠ūčbĄĮ▌S╔ŽŻ¼╚¶▌S╠ūĄ─ā╚(n©©i)ÅĮ║═▌SĄ─ų▒ÅĮ▓╗═¼Ż©Ģ║▓╗┐╝æ]ķgŽČĪó▀^Č╔║═▀^ė»┼õ║ŽŪķørŻ®Ż¼▌S╠ūį┌čb┼õĢr(sh©¬)Ż¼─▄Ė∙ō■(j©┤)▌SĄ─ų▒ÅĮ│▀┤ńČ°ūįäė(d©░ng)Ė─ūāŲõā╚(n©©i)ÅĮ│▀┤ńŻ¼ęįØMūŃčb┼õŻ¼Ūę▌S╠ūĄ─═ŌÅĮ╗“▒┌║±ę▓═¼Ģr(sh©¬)░l(f©Ī)╔·ŽÓæ¬(y©®ng)ūā╗»Ż¼▀@śė▒ž─▄┤¾┤¾╠ßĖ▀čb┼õįO(sh©©)ėŗ(j©¼)Ą─ą¦┬╩ĪŻ╗∙ė┌ĻP(gu©Īn)┬ō(li©ón)║═│▀┤ń“ī(q©▒)äė(d©░ng)įŁ└ĒŻ¼╩╣ė├CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Į©┴ó┐╔ųžė├Ą─ģóöĄ(sh©┤)╗»ųŪ─▄łD╦žŻ¼š{(di©żo)ė├CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Ą─Č■┤╬ķ_░l(f©Ī)║»öĄ(sh©┤)ęį╝░C++ś╦(bi©Īo)£╩(zh©│n)─Ż░ÕÄņŻ©Standard Template LibraryŻ¼║åĘQSTLŻ®Ż¼═©▀^ģóöĄ(sh©┤)├¹Į©┴ó┴╦▓╗═¼╠žš„│▀┤ńų«ķgĄ─ė│╔õĻP(gu©Īn)ŽĄŻ¼ęį┤╦üĒ“ī(q©▒)äė(d©░ng)ŽÓæ¬(y©®ng)Ą─│▀┤ńųĄŻ¼į┌CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)╔ŽŻ¼│╔╣”īŹ(sh©¬)¼F(xi©żn)┴╦ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)╣”─▄ĪŻ
1 ĻP(gu©Īn)┬ō(li©ón)įŁ└Ē
ĻP(gu©Īn)┬ō(li©ón)╩ŪųĖ╩┬╬’ų«ķg╦∙Š▀ėąĄ─▒╦┤╦╝s╩°Ą─ĻP(gu©Īn)ŽĄĪŻį┌ÖC(j©®)ąĄ«a(ch©Żn)ŲĘųąŻ¼ĻP(gu©Īn)┬ō(li©ón)ąį¾w¼F(xi©żn)į┌čb┼õīŹ(sh©¬)¾w─Żą═ųą▓╗═¼┴Ń╝■īŹ(sh©¬)¾wų«ķg╦∙Š▀ėąĄ─ā╚(n©©i)į┌┬ō(li©ón)ŽĄŻ¼═©▀^ę╗éĆ(g©©)┴Ń╝■īŹ(sh©¬)¾wĄ──│ę╗▓┐Ęųī┘ąįŻ¼┐╔ęį═Ļš¹╗“▓┐ĘųĄž═Ųī¦(d©Żo)│÷┴Ēę╗éĆ(g©©)īŹ(sh©¬)¾wĄ──│ę╗▓┐Ęųī┘ąįŻ¼Š▀ėąĻP(gu©Īn)┬ō(li©ón)ĻP(gu©Īn)ŽĄĄ─┴Ń╝■īŹ(sh©¬)¾w╗ź×ķĻP(gu©Īn)┬ō(li©ón)å╬į¬ĪŻĻP(gu©Īn)┬ō(li©ón)┐╔Ęų×ķūā┴┐ĻP(gu©Īn)┬ō(li©ón)║═Äū║╬ĻP(gu©Īn)┬ō(li©ón)ā╔ŅÉĪŻ
1.1 ūā┴┐ĻP(gu©Īn)┬ō(li©ón)
ūā┴┐ĻP(gu©Īn)┬ō(li©ón)╩Ūį┌Ęųī┘▓╗═¼ģóöĄ(sh©┤)╝»Ą─ūā┴┐ķgĮ©┴óė│╔õĻP(gu©Īn)ŽĄŻ¼ęį▒Ńī”(du©¼)─│éĆ(g©©)ūā┴┐ą▐Ė─║¾Ż¼┼cų«ī”(du©¼)æ¬(y©®ng)Ą─ūā┴┐─▄ūįäė(d©░ng)ą▐Ė─ĪŻ╦³▀mė├ė┌čb┼õŁh(hu©ón)Š│Ž┬┴Ń╝■ķg│▀┤ń╝s╩°Ą─ĻP(gu©Īn)┬ō(li©ón)ĪŻī”(du©¼)ė┌ģóöĄ(sh©┤)╗»╠žš„įņą═ŽĄĮy(t©»ng)Ż¼Ųõśŗ(g©░u)įņĄ─╠žš„─Żą═┐╔ęį▒Ē╩Š×ķŻ║
M={FŻ¦iŻ¼Pi}
╩ĮųąŻ║M-ŽĄĮy(t©»ng)╦∙śŗ(g©░u)įņĄ─╠žš„─Żą═Ż╗
Fi——śŗ(g©░u)│╔╠žš„─Żą═Ą─ĮM│╔╠žš„Ż╗
Pi——┼c╠žš„ŽÓī”(du©¼)æ¬(y©®ng)Ą─ģóöĄ(sh©┤)╝»ĪŻ
ė┌╩ŪŻ¼«ö(d©Īng)ę²╚ļŲõ╦³Š▀ėą╣ż│╠ęŌ┴xĄ─│▀┤ń┐žųŲģóöĄ(sh©┤)╝»QiŻ¼▓óĮ©┴óģóöĄ(sh©┤)╝»Qi┼cPiĄ─ė│╔õĻP(gu©Īn)ŽĄfŻ¼╩╣Ą├Ż║Pi=f(Qi)ĪŻ
─Ū├┤Ż¼Äū║╬─Żą═Š═┐╔Š▀ėą┴Ēę╗ĘN▒Ē╩ŠŻ║
M={FŻ¦iŻ¼f(Qi))
▀@śėŻ¼ī”(du©¼)ą┬ģóöĄ(sh©┤)Ą─ą▐Ė─Ż¼▒ž╚╗ę²Ų─Żą═Ą─Ė³ą┬ĪŻ╚¶ą┬ģóöĄ(sh©┤)╩ŪŲõ╦³┴Ń╝■Ą─┐žųŲģóöĄ(sh©┤)Ż¼─ŪŠ═ęŌ╬Čų°Ųõ╦³┴Ń╝■Š▀ėą┴╦“ī(q©▒)äė(d©░ng)įō┴Ń╝■Ą──▄┴”ĪŻ
1.2 Äū║╬ĻP(gu©Īn)┬ō(li©ón)
Äū║╬ĻP(gu©Īn)┬ō(li©ón)╩Ūīóę╗éĆ(g©©)┴Ń╝■Ą─Äū║╬ą┼Žó╠ß╚Ī│÷üĒŻ¼ū„×ķŲõ╦³┴Ń╝■Ą─╗∙£╩(zh©│n)╗“┐žųŲĮY(ji©”)śŗ(g©░u)Ż¼ęį▀_(d©ó)ĄĮ┬ō(li©ón)äė(d©░ng)Ą──┐Ą─ĪŻ╦³▀mė├ė┌ėąą╬ĀŅ╗“Č©╬╗ę¬Ū¾Ą─ł÷(ch©Żng)║ŽĪŻ╬─ųąų„ę¬╩╣ė├ūā┴┐ĻP(gu©Īn)┬ō(li©ón)ĪŻ
2 │▀┤ń“ī(q©▒)äė(d©░ng)įŁ└Ē
┤²čb┼õ╝■Ą─ųžą┬╔·│╔╩Ūī”(du©¼)ŽÓæ¬(y©®ng)ųŪ─▄łD╦ž▀M(j©¼n)ąą│▀┤ń“ī(q©▒)äė(d©░ng)Ą─▀^│╠ĪŻ│▀┤ń“ī(q©▒)äė(d©░ng)╝┤į┌┴Ń╝■═ž?f©┤)õĮY(ji©”)śŗ(g©░u)▓╗ūāĄ─ŪķørŽ┬Ż¼░č┴Ń╝■Ą─│▀┤ńģóöĄ(sh©┤)Č©┴x×ķ│▀┤ńūā┴┐Ż¼▓óČ©┴x│÷ūā┴┐ķgĄ─ĻP(gu©Īn)ŽĄŻ¼«ö(d©Īng)ĮoČ©▓╗═¼Ą─│▀┤ńųĄŻ¼Š═┐╔Ą├ĄĮę╗ĮMĮY(ji©”)śŗ(g©░u)ŽÓ═¼Č°│▀┤ń▓╗═¼Ą─┴Ń╝■ĪŻ├┐ę╗ŅÉ┤²čb┼õ╝■ī”(du©¼)æ¬(y©®ng)ę╗éĆ(g©©)ųŪ─▄łD╦žŻ¼į┌ųŪ─▄łD╦žųąČ©┴x│▀┤ńūā┴┐║═ūā┴┐ķgĄ─ĻP(gu©Īn)ŽĄĪŻė╔ė┌CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)▓╔ė├┴╦ģóöĄ(sh©┤)╗»Ą─įO(sh©©)ėŗ(j©¼)ĘĮĘ©Ż¼į┌įO(sh©©)ėŗ(j©¼)ųŪ─▄łD╦žĢr(sh©¬)ø]ėą▒žę¬į┘ū÷│▀┤ńĄ─╝s╩°Ū¾ĮŌŻ¼╦∙ęįŻ¼┴Ń╝■Ą─ūŅ║¾╔·│╔┐╔ęįę└┐┐CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Ą─ģóöĄ(sh©┤)╗»╣”─▄üĒīŹ(sh©¬)¼F(xi©żn)Ż¼╝┤═©▀^ė├ą┬Ą─│▀┤ńųĄī”(du©¼)╩┬Ž╚£╩(zh©│n)éõ║├Ą─ųŪ─▄łD╦ž▀M(j©¼n)ąą│▀┤ń“ī(q©▒)äė(d©░ng)Ż¼üĒ╔·│╔ę╗éĆ(g©©)ą┬Ą─┤²čb┼õ╝■ĪŻ
3 CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)╝░Č■┤╬ķ_░l(f©Ī)ĻP(gu©Īn)µI╝╝ąg(sh©┤)
CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)╩Ūę╗éĆ(g©©)╚½╣”─▄Ą─CAD▄ø╝■Ż¼▓╔ė├═ŽĘĮ╩ĮĄ─īŹ(sh©¬)¾wįņą═Ż¼▓óĮY(ji©”)║ŽųŪ─▄▓ČūĮ┼c╚²ŠSŪ“Č©╬╗╝╝ąg(sh©┤)Ż¼╩╣Ą├ø]ėąŲõ╦¹įņą═▄ø╝■į┌įO(sh©©)ėŗ(j©¼)ą¦┬╩║═╦┘Č╚╔Ž─▄┼cŲõŽÓŲź┼õĪŻ═ŽĘĮ╩Į╩ŪųĖ─▄ē“üĒ╗žė├╩¾ś╦(bi©Īo)═ŽĘ┼ś╦(bi©Īo)£╩(zh©│n)╝■║═ūįČ©┴xĄ─įO(sh©©)ėŗ(j©¼)į¬╦žĪŻųŪ─▄▓ČūĮ╩Ūę╗éĆ(g©©)äė(d©░ng)æB(t©żi)Ą─╚²ŠS╝s╩°╦ŃĘ©╣żŠ▀Ż¼╦³×ķłDą╬ĘĮ╩ĮŽ┬Ą─╠žš„║═łD╦ž═Žäė(d©░ng)╠ß╣®Š½┤_Č©╬╗║═ī”(du©¼)²R╣”─▄ĪŻ╚²ŠSŪ“╣żŠ▀×ķĖ„ĘNī”(du©¼)Ž¾Ą─ŲĮęŲĪóą²▐D(zhu©Żn)╗“Ė„ĘNÅ═(f©┤)ļs╚²ŠSūāōQ╠ß╣®┴╦Š½┤_Č©╬╗ĘĮĘ©ĪŻĮY(ji©”)║ŽÄū║╬ųŪ─▄▓ČūĮ╣żŠ▀Ż¼┐╔īŹ(sh©¬)¼F(xi©żn)ī”(du©¼)Å═(f©┤)ļs┴Ń╝■Ą─čb┼õ┼cą▐Ė─ĪŻųŪ─▄łD╦ž╩ŪģóöĄ(sh©┤)╗»Ą─╚²ŠS─Żą═¾wĪŻ×ķ▒▄├ŌųžÅ═(f©┤)ä┌äė(d©░ng)Ż¼╠ßĖ▀įO(sh©©)ėŗ(j©¼)ą¦┬╩Ż¼ś╦(bi©Īo)£╩(zh©│n)╝■Īó│Żė├╝■╝░ś╦(bi©Īo)£╩(zh©│n)ĮY(ji©”)śŗ(g©░u)Ą─╚²ŠSģóöĄ(sh©┤)╗»─Żą═ÄņĄ─Į©┴óŻ¼╩ŪCADŽĄĮy(t©»ng)ū▀Ž“?q©▒)Źė├╗»Ą─▒ž╚╗┌ģä?sh©¼)ĪŻCAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Ą─į¬╦žÄņ¾w¼F(xi©żn)┴╦▀@ĘN╦╝ŽļĪŻ
CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)╠ß╣®┴╦ę╗éĆ(g©©)Č■┤╬ķ_░l(f©Ī)Ž“?q©▒)?ICAddinAppWizard.awx)Ż¼╦³┐╔ęįÄ═ų·ė├æ¶äō(chu©żng)Į©ę╗éĆ(g©©)╗∙ė┌Add-inĄ─ATL╣ż│╠ĪŻīóŲõ╠Ē╝ėĄĮVC++Ą─Common\MSDev98\Template\─┐õøŽ┬Ż¼▀@śėė├æ¶┐╔ęį═©▀^VC++Ą─IDEüĒäō(chu©żng)Į©ūį╝║Ą─╣ż│╠ĪŻ
į┌CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Č■┤╬ķ_░l(f©Ī)Łh(hu©ón)Š│ųąŻ¼ķ_░l(f©Ī)╚╦åT┐╔ęį½@Ą├/įO(sh©©)ų├ūėū°ś╦(bi©Īo)ŽĄŽÓī”(du©¼)ė┌ŲõĖĖū°ś╦(bi©Īo)ŽĄĄ─ūāōQŠžĻćChildToParentĪŻķ_░l(f©Ī)╚╦åTę▓┐╔ęį½@Ą├/įO(sh©©)ų├Õ^(Anchor)Ą─ūāōQŠžĻćŻ¼Õ^╩Ūę╗éĆ(g©©)ī”(du©¼)Ž¾ę└ĖĮė┌Ųõ╦¹ī”(du©¼)Ž¾Ą─³c(di©Żn)ĪŻūėī”(du©¼)Ž¾Ą─Õ^ūāōQŠžĻćA╩ŪųĖūėī”(du©¼)Ž¾Ą─Õ^ŽÓī”(du©¼)ė┌ūėū°ś╦(bi©Īo)ŽĄĄ─ūāōQŠžĻćĪŻ═©▀^CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Ą─Į╗╗źĮń├µ(UI)Ż¼ė├æ¶┐╔ęį½@Ą├ūėī”(du©¼)Ž¾Ą─Õ^į┌ĖĖū°ś╦(bi©Īo)ŽĄųąĄ─Š½┤_╬╗ų├ĪŻ╬╗ų├ūāōQŠžĻćP╩Ūūėī”(du©¼)Ž¾Ą─Õ^ŽÓī”(du©¼)ė┌ĖĖū°ś╦(bi©Īo)ŽĄųąĄ─ūāōQŠžĻćĪŻÕ^Īó╬╗ų├║═ChildToParentūāōQŠžĻćĄ─ĻP(gu©Īn)ŽĄ╚ńłD1╦∙╩ŠĪŻ
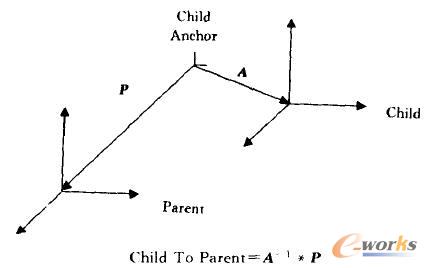
łD1 Õ^Īó╬╗ų├║═Child To ParentūāōQŠžĻćĄ─ĻP(gu©Īn)ŽĄ
į┌CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)ųąŻ¼├┐éĆ(g©©)įO(sh©©)ėŗ(j©¼)Įń├µėąę╗éĆ(g©©)╚½Šųū°ś╦(bi©Īo)ŽĄŻ¼Įń├µ╔ŽĄ─├┐éĆ(g©©)┴Ń╝■ėąę╗éĆ(g©©)Šų▓┐ū°ś╦(bi©Īo)ŽĄŻ¼┴Ń╝■╔ŽĄ─├┐éĆ(g©©)╠žš„ę▓ėąę╗éĆ(g©©)Šų▓┐ū°ś╦(bi©Īo)ŽĄĪŻį┌▀xųą┴Ń╝■Ą─ĀŅæB(t©żi)Ž┬▐D(zhu©Żn)äė(d©░ng)╚²ŠSŪ“Ż¼ät┴Ń╝■Ą─Šų▓┐ū°ś╦(bi©Īo)ŽĄīóļSų°╚²ŠSŪ“ę╗Ų▐D(zhu©Żn)äė(d©░ng)ĪŻī”(du©¼)ė┌čb┼õŪķørŻ¼čb┼õ╗∙╝■Ą─ū°ś╦(bi©Īo)ŽĄ╩ŪĖĖū°ś╦(bi©Īo)ŽĄŻ¼┤²čb┼õ╝■Ą─ū°ś╦(bi©Īo)ŽĄ╩Ūūėū°ś╦(bi©Īo)ŽĄĪŻ╬─ųąų╗┐╝æ]ūėū°ś╦(bi©Īo)ŽĄī”(du©¼)ĖĖū°ś╦(bi©Īo)ŽĄĄ─▐D(zhu©Żn)ōQŠžĻćŻ¼▀@śė╝┤╩╣▐D(zhu©Żn)äė(d©░ng)čb┼õ╗∙╝■Ą─╚²ŠSŪ“Ż¼į┌čb┼õĢr(sh©¬)ę▓▓╗ė├┐╝æ]┤╦äė(d©░ng)ū„ī”(du©¼)┤²čb┼õ¾wĄ─ė░ĒæĪŻ
4 ś╦(bi©Īo)£╩(zh©│n)─Ż░ÕÄņ(STL)
STL╩Ūę╗éĆ(g©©)Ė▀ą¦Ą─C╩«╩«│╠ą“ÄņŻ¼╦³╩ŪANSI/ISO C++ś╦(bi©Īo)£╩(zh©│n)ųąĄ─ę╗▓┐ĘųĪŻįōÄņ░³║¼┴╦ųTČÓ│Żė├Ą─╗∙▒ŠöĄ(sh©┤)ō■(j©┤)ĮY(ji©”)śŗ(g©░u)║═╗∙▒Š╦ŃĘ©Ż¼×ķ│╠ą“åT╠ß╣®┴╦ę╗éĆ(g©©)┐╔öU(ku©░)š╣Ą─æ¬(y©®ng)ė├┐“╝▄Ż¼Ė▀Č╚¾w¼F(xi©żn)┴╦▄ø╝■Ą─┐╔Å═(f©┤)ė├ąįĪŻÅ─▀ē▌ŗīė┤╬üĒ┐┤Ż¼į┌STLųą¾w¼F(xi©żn)┴╦Ę║ą═╗»│╠ą“įO(sh©©)ėŗ(j©¼)Ą─╦╝ŽļŻ╗Å─īŹ(sh©¬)¼F(xi©żn)īė┤╬┐┤Ż¼š¹éĆ(g©©)STL╩Ūęįę╗ĘNŅÉą═ģóöĄ(sh©┤)╗»Ą─ĘĮ╩ĮīŹ(sh©¬)¼F(xi©żn)Ą─ĪŻSTLų„ę¬ė╔ā╔ĘNĮM╝■śŗ(g©░u)│╔Ż║ę╗╩Ū╚▌Ų„Ż¼░³└©vectorŻ¼listŻ¼mapĄ╚ŅÉĪŻ┴Ēę╗ĘN╩Ūė├ęį▓┘ū„▀@ą®╚▌Ų„ŅÉĄ─Ę║ą═╦ŃĘ©ĪŻmap╩Ūę╗ī”(du©¼)ī”(du©¼)Ą─key/valuPĮM║ŽŻ¼keyė├ė┌╦č╦„Ż¼valueė├üĒ▒Ē╩Šę¬┤µā”(ch©│)╗“╚Ī│÷Ą─öĄ(sh©┤)ō■(j©┤)ĪŻ
5 ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)Ą─īŹ(sh©¬)¼F(xi©żn)
ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)╩╣ė├STL╚▌Ų„mapŅÉĄ─īŹ(sh©¬)└²Ż¼key▒Ē╩ŠģóöĄ(sh©┤)├¹Ż¼value▒Ē╩ŠģóöĄ(sh©┤)ųĄĪŻūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)Ą─īŹ(sh©¬)¼F(xi©żn)║═ģóöĄ(sh©┤)Ą─éĆ(g©©)öĄ(sh©┤)¤oĻP(gu©Īn)ĪŻčb┼õ╗∙╝■║═┤²čb┼õ╝■Ą─ģóöĄ(sh©┤)├¹┐╔ęį╚╬╚ĪŻ¼Ą½╩Ūę¬į┌ūįäė(d©░ng)čb┼õ▀^│╠ųąčb┼õ╗∙╝■Ą─ģóöĄ(sh©┤)─▄š²┤_“ī(q©▒)äė(d©░ng)┤²čb┼õ╝■ŽÓæ¬(y©®ng)Ą─ģóöĄ(sh©┤)Ż¼ät▒žĒÜ╩╣╦³ézŽÓī”(du©¼)æ¬(y©®ng)Ą─ģóöĄ(sh©┤)├¹ę╗ų┬Ūę╬©ę╗Ż¼š¹éĆ(g©©)ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)┴„│╠╚ńłD2╦∙╩ŠĪŻ
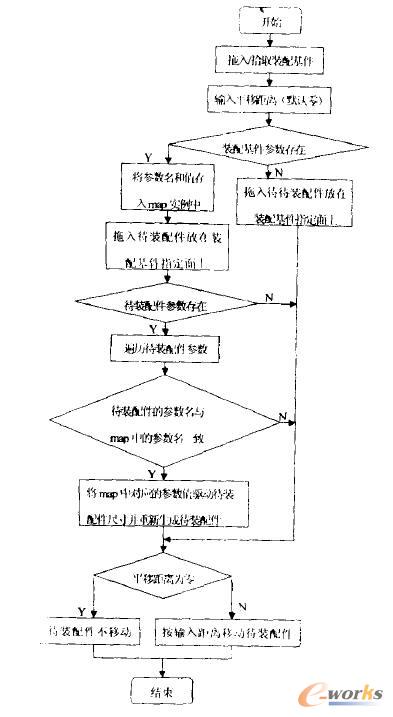
łD2 ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)┴„│╠
įö╩÷╚ńŽ┬Ż║
Step1.╩¾ś╦(bi©Īo)═Ž│÷/╩░╚Īčb┼õ╗∙╝■Ż¼▌ö╚ļ┤²čb┼õ¾wę¬čb╚ļĄ─ŠÓļxųĄŻ©─¼šJ(r©©n)Ą─ŠÓļxųĄ╩Ū┴ŃŻ¼╝┤┤²čb┼õ¾wčb┼õį┌╦∙▀xō±Ą─čb┼õ╗∙╝■Ą─čb┼õ├µ╔ŽŻ®Ż¼īóŠÓļxųĄ┤µā”(ch©│)Ž┬üĒĪŻ
Step2.Öz▓ķmapŅÉĄ─īŹ(sh©¬)└²╩Ūʱ×ķ┐šŻ¼╚ń╣¹▓╗×ķ┐šŻ¼ätŪÕ┐šĪŻ
Step3.▒ķÜvčb┼õ╗∙╝■Ą─├┐ę╗éĆ(g©©)╠žš„Ż¼ī”(du©¼)ė┌├┐ę╗éĆ(g©©)╠žš„Ż¼╚ń╣¹ėąģóöĄ(sh©┤)Ż¼īóģóöĄ(sh©┤)├¹║═ģóöĄ(sh©┤)ųĄ┤µ╚╦mapŅÉĄ─īŹ(sh©¬)└²ųąĪŻ
Step4.īóįO(sh©©)ėŗ(j©¼)łD╦žÄņųąęčįO(sh©©)ų├║├ģóöĄ(sh©┤)Ą─┤²čb┼õ╝■═Ž│÷Ż¼Ę┼į┌Ą┌ę╗▓Į╦∙▀xĄ─čb┼õ╗∙╝■Ą─ŽÓæ¬(y©®ng)čb┼õ├µ╔ŽĪŻ
Step5.Öz▓ķmapŅÉĄ─īŹ(sh©¬)└²╩Ūʱ×ķ┐šŻ¼╚ń╣¹×ķ┐šŻ¼į┘Öz▓ķŠÓļxųĄ╩Ūʱ×ķ┴ŃŻ¼╚ń╣¹×ķ┴ŃŻ¼ät▓╗ū÷╚╬║╬Ė─ūāŻ╗╚¶ŠÓļxųĄ▓╗×ķ┴ŃŻ¼ätīó┤²čb┼õ╝■░┤╦∙▀xčb┼õ╗∙╝■Ą─ŽÓæ¬(y©®ng)čb┼õ├µĄ─Ę©ŠĆĘĮŽ“╔ŽŻ¼ŲĮęŲĄ┌ę╗▓Į▌ö╚ļĄ─ŠÓļxųĄĪŻ
Step6.╚ń╣¹mapŅÉĄ─īŹ(sh©¬)└²▓╗×ķ┐šŻ¼ät▒ķÜv┤²čb┼õ¾wĄ─├┐éĆ(g©©)╠žš„Ż¼ī”(du©¼)ė┌├┐éĆ(g©©)╠žš„Ż¼╚ń╣¹ėąģóöĄ(sh©┤)Ż¼ät╦č╦„mapŅÉĄ─īŹ(sh©¬)└²ųąĄ─ģóöĄ(sh©┤)├¹Ż¼╚ń╣¹┤µį┌ę╗ų┬Ą─ģóöĄ(sh©┤)├¹Ż¼ät╠ß╚Ī┤╦ģóöĄ(sh©┤)├¹ī”(du©¼)æ¬(y©®ng)Ą─ģóöĄ(sh©┤)ųĄŻ¼īó┤²čb┼õ¾wŽÓ═¼Ą─ģóöĄ(sh©┤)├¹ī”(du©¼)æ¬(y©®ng)Ą─ģóöĄ(sh©┤)ųĄĖ─│╔┤╦ųĄŻ¼╚╗║¾īómapŅÉĄ─īŹ(sh©¬)└²ųąĄ─▀@éĆ(g©©)ģóöĄ(sh©┤)ī”(du©¼)äh│²Ż¼▀@śė┐╔ęį╠ßĖ▀ęį║¾╦č╦„mapŅÉīŹ(sh©¬)└²ģóöĄ(sh©┤)├¹Ą─ą¦┬╩Ż¼Įėų°└^└m(x©┤)╦č╦„┤²čb┼õ¾wĄ─Ž┬ę╗éĆ(g©©)ģóöĄ(sh©┤)Ż¼ųžÅ═(f©┤)╔Ž├µ╦∙╩÷▓┘ū„Ż¼ų▒ĄĮ▒ķÜv═Ļ┤²čb┼õ¾w╦∙ėąĄ─ģóöĄ(sh©┤)Ż¼╚╗║¾░┤ą┬Ą─ģóöĄ(sh©┤)ųĄųžą┬╔·│╔┤²čb┼õ╝■Ż╗į┘Öz▓ķŠÓļxųĄ╩Ūʱ×ķ┴ŃŻ¼╚ń╣¹×ķ┴ŃŻ¼ät┤²čb┼õ╝■▓╗ū÷╚╬║╬ŲĮęŲŻ╗╚¶ŠÓļx▓╗×ķ┴ŃŻ¼ätīóą┬╔·│╔Ą─┤²čb┼õ╝■░┤╦∙▀xčb┼õ╗∙╝■Ą─ŽÓæ¬(y©®ng)čb┼õ├µĄ─Ę©ŠĆĘĮŽ“╔ŽŻ¼ŲĮęŲĄ┌ę╗▓Į▌ö╚ļĄ─ŠÓļxųĄĪŻ
Step7.īóŠÓļxųĄįO(sh©©)×ķ┴ŃŻ¼īómapŅÉĄ─īŹ(sh©¬)└²ŪÕ┐šŻ¼┤╦Ģr(sh©¬)═Ļ│╔ę╗┤╬ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)ĪŻ
Ž┬├µ╩Ūę╗║åå╬Ą─īŹ(sh©¬)¼F(xi©żn)įŁą═ĪŻ╩╣ė├CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)ū÷│÷łD3╦∙╩ŠĄ─čb┼õ╗∙╝■║═┤²čb┼õ╝■Ż¼┤╦Ģr(sh©¬)꬚²┤_įO(sh©©)Č©╠žš„ų«ķgĄ─╝s╩°ĻP(gu©Īn)ŽĄŻ╗į┘░┤łD╔Ž╦∙╩ŠĄ─ģóöĄ(sh©┤)Ęų▓╝Ż¼═©▀^ģóöĄ(sh©┤)▒ĒįO(sh©©)Č©║├ģóöĄ(sh©┤)├¹║═ģóöĄ(sh©┤)ųĄĪŻłD4╩Ūčb┼õ╗∙╝■Ą─ģóöĄ(sh©┤)įO(sh©©)Č©Ż¼┤²čb┼õ╝■ę▓═¼śė▀@śėįO(sh©©)Č©Ż╗╚╗║¾īóįO(sh©©)Č©║├ģóöĄ(sh©┤)Ą─čb┼õ╗∙╝■║═┤²čb┼õ╝■═ŽĄĮįO(sh©©)ėŗ(j©¼)į¬╦žÄņŻ¼ĘĮ▒Ńęį║¾ųžė├ĪŻ
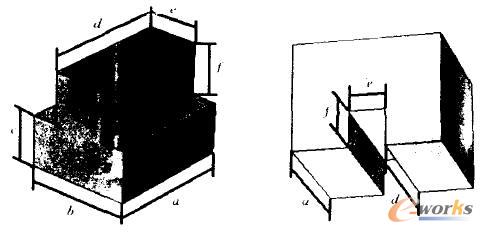
łD3 čb┼õ╗∙╝■(ū¾)║═┤²čb┼õ╝■Ą─ģóöĄ(sh©┤)Ęų▓╝
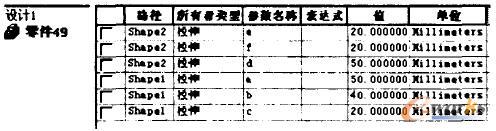
łD4 čb┼õ╗∙╝■Ą─ģóöĄ(sh©┤)įO(sh©©)Č©
Å─įO(sh©©)ėŗ(j©¼)į¬╦žÄņīóčb┼õ╗∙╝■═Ž│÷Ż¼ė├╩¾ś╦(bi©Īo)╩░╚ĪŻ¼▌ö╚ļčb╚ļĄ─ŠÓļxųĄŻ¼╚╗║¾Å─įO(sh©©)ėŗ(j©¼)į¬╦žÄņųąŻ¼īó┤²čb┼õ¾w╝■═Ž│÷Ę┼į┌čb┼õ╗∙¾wūŅ╔Ž├µ╔ŽŻ¼ųŪ─▄▓ČūĮ³c(di©Żn)╩Ū├µĄ─ųą³c(di©Żn)Ż¼┐╔ęį┐┤ĄĮ═Ž╚ļķ_╩╝Ą─ą¦╣¹╚ńłD5a╦∙╩ŠŻ¼╚╗║¾┤²čb┼õ╝■Ą├ĄĮŽÓæ¬(y©®ng)Ą─čb┼õ╗∙╝■Ą─│▀┤ń║¾ųžą┬╔·│╔▓óŲĮęŲŻ¼čb┼õ╗∙╝■║═┤²čb┼õ╝■Š═│╔╣”Ąžčb┼õį┌ę╗Ų┴╦Ż¼╚ńłD5b╦∙╩ŠĪŻ
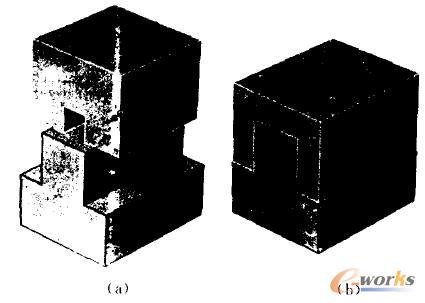
łD5 ųŪ─▄čb┼õįO(sh©©)ėŗ(j©¼)Ą─īŹ(sh©¬)¼F(xi©żn)
ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)═©▀^╦č╦„ŽÓ═¼Ą─ģóöĄ(sh©┤)├¹üĒĮ©┴ó▓╗═¼╠žš„│▀┤ńų«ķgĄ─ė│╔õĻP(gu©Īn)ŽĄŻ¼▓óęį┤╦üĒ“ī(q©▒)äė(d©░ng)ŽÓæ¬(y©®ng)Ą─│▀┤ńųĄŻ¼ę“Č°čb┼õ╗∙╝■║═┤²čb┼õ╝■Ą─įO(sh©©)Č©ų╗║══Ž│÷Ą─Ū░║¾Ēśą“ėąĻP(gu©Īn)ĪŻ┤╦▀^│╠ę▓▀mė├ė┌▓┐╝■Ą─čb┼õŻ¼Ą½╩Ū╚ń╣¹ģóöĄ(sh©┤)éĆ(g©©)öĄ(sh©┤)║▄ČÓŻ¼ätųŁ╦Ń┴┐īó▌^┤¾Ż¼▓óŪę┴Ń╝■Ą─╠žš„ų«ķgĄ─╝s╩°ĻP(gu©Īn)ŽĄĄ─įO(sh©©)Č©Ż¼ęį╝░╦∙ėąģóöĄ(sh©┤)Ą─├³├¹ę▓╩ŪąĶę¬ūą╝Ü(x©¼)ūóęŌĄ─ĄžĘĮĪŻ
6 ĮY(ji©”)šō
╗∙ė┌ĻP(gu©Īn)┬ō(li©ón)║═│▀┤ń“ī(q©▒)äė(d©░ng)įŁ└ĒŻ¼╩╣ė├CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Į©┴ó┐╔ųžė├Ą─ģóöĄ(sh©┤)╗»ųŪ─▄łD╦žŻ¼š{(di©żo)ė├CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)Ą─Č■┤╬ķ_░l(f©Ī)║»öĄ(sh©┤)ęį╝░C++ś╦(bi©Īo)£╩(zh©│n)─Ż░ÕÄņŻ¼═©▀^ģóöĄ(sh©┤)├¹Į©┴ó┴╦▓╗═¼╠žš„│▀┤ńų«ķgĄ─ė│╔õĻP(gu©Īn)ŽĄŻ¼ęį┤╦üĒ“ī(q©▒)äė(d©░ng)ŽÓæ¬(y©®ng)Ą─│▀┤ńųĄŻ¼į┌CAXAīŹ(sh©¬)¾wįO(sh©©)ėŗ(j©¼)╔Ž│╔╣”īŹ(sh©¬)¼F(xi©żn)┴╦ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)╣”─▄Ż¼▓óĮo│÷æ¬(y©®ng)ė├īŹ(sh©¬)└²įŁą═ĪŻ┤╦╣”─▄ęčæ¬(y©®ng)ė├ė┌ć°╝ę“░╦┴∙╚²”ėŗ(j©¼)äØŽ╚▀M(j©¼n)ųŲįņ┼cūįäė(d©░ng)╗»ŅI(l©½ng)ė“CIMSų„Ņ}─┐ś╦(bi©Īo)Ą─░l(f©Ī)š╣ĒŚ(xi©żng)─┐ĪČ├µŽ“╝ęļŖ«a(ch©Żn)ŲĘĄ─╚²ŠSCADäō(chu©żng)ą┬įO(sh©©)ėŗ(j©¼)ŽĄĮy(t©»ng)ĪĘų«ųąŻ¼┐╔ęįį÷ÅŖ(qi©óng)čb┼õįO(sh©©)ėŗ(j©¼)Ą─ĘĮ▒Ńąįęį╝░╠ßĖ▀įO(sh©©)ėŗ(j©¼)ą¦┬╩Ż¼▓óŪę┤╦ĘĮĘ©ę▓═¼śė▀mė├ė┌Ųõ╦³Ą─CAD▄ø╝■ĪŻ
║╦ą─ĻP(gu©Īn)ūóŻ║═ž▓ĮERPŽĄĮy(t©»ng)ŲĮ┼_(t©ói)╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śI(y©©)äš(w©┤)ŅI(l©½ng)ė“ĪóąąśI(y©©)æ¬(y©®ng)ė├Ż¼╠N(y©┤n)║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śI(y©©)äš(w©┤)╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬(y©®ng)µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśI(y©©)äš(w©┤)ŅI(l©½ng)ė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śI(y©©)ĻP(gu©Īn)ūóERP╣▄└ĒŽĄĮy(t©»ng)Ą─║╦ą─ŅI(l©½ng)ė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śI(y©©)ą┼Žó╗»Į©įO(sh©©)╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D(zhu©Żn)▌dšł(q©½ng)ūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠW(w©Żng)http://www.lukmueng.com/
▒Š╬─ś╦(bi©Īo)Ņ}Ż║╗∙ė┌ĻP(gu©Īn)┬ō(li©ón)Ą─ūįäė(d©░ng)čb┼õįO(sh©©)ėŗ(j©¼)
▒Š╬─ŠW(w©Żng)ųĘŻ║http://www.lukmueng.com/html/solutions/14019317179.html



▀xą═ųąą─")
¾w“×(y©żn)ųąą─")
«a(ch©Żn)ŲĘ┘Å┘I")
æ(zh©żn)┬į║Žū„")