▀b▓┘ū„ęŲäėÖCŲ„╚╦į┌╬’└Ē┐šķg╔Ž┐╔ęįīŹ¼F╚╦ŅÉĖąų¬─▄┴”║═ąą×ķ─▄┴”Ą─čė╔ņŻ║į┌ą┼Žóīė┤╬╔Žīó▀hČ╦Ą─ęŲäėÖCŲ„╚╦┼c▓┘ū„╚╦åT▀BĮėį┌ę╗éĆķ]Łh╗ž┬Ę└’ĪŻīŹĢrĄž┐žųŲ▀hČ╦ęŲäėÖCŲ„╚╦Ą─▀\äėŻ¼ęįūŅ┤¾Ž▐Č╚Ąž└¹ė├▀hĮ³Č╦Ą─įOéõĪó┘Yį┤║═▀b▓┘ū„š▀Ą─ųŪ┴”ĪóĮø“ׯ¼Å─Č°īŹ¼F┘Yį┤ūŅ╝č┼õų├Ż¼═Ļ│╔╠žČ©Ą─╚╬äšĪŻ▀b▓┘ū„ęŲäėÖCŲ„╚╦į┌║▄ČÓŅIė“Š▀ėąÅVķ¤Ą─æ¬ė├Ū░Š░Ż¼╚ńąŪļH╠Į£yĪó╣żśIųŲįņĪó╬ŻļUŁhŠ│ĪóĘ■äšąąśIęį╝░▀h│╠Į╠ė²ĪŻŲõų„ꬥ─╝╝ągå¢Ņ}ėą╚╦ÖCĮń├µĄ─įOėŗŻ¼▀h│╠═©ėŹĄ─å¢Ņ}║═ęŲäėÖCŲ„╚╦Ą─┐žųŲĘĮĘ©ĪŻ
╗∙ė┌InternetĄ─▀b▓┘ū„╩ŪęŲäėÖCŲ„╚╦Ą─ę╗éĆųžę¬čąŠ┐║═æ¬ė├ŅIė“Ż¼╬─½IųąĄ─▀b▓┘ū„ęŲäėÖCŲ„╚╦Ż¼┐╔ęį═©▀^Web×gė[Ų„▀Mąą▀b▓┘ū„Ż¼Ųõ╚▒³c╩Ūį┌▓┘ū„╚╦åT╩╣ė├Ą─▀b▓┘ū„Įń├µųąŻ¼╦∙╠ß╣®Ą─┐žųŲęŲäėÖCŲ„╚╦Ą─ĘĮ╩Į▓╗ČÓŻ¼╣”─▄å╬ę╗ĪŻ╬─½IųąĄ─▀b▓┘ū„ęŲäėÖCŲ„╚╦Ż¼ŲõözŽ±Ņ^▓ó▓╗╩Ū░▓čbį┌ęŲäėÖCŲ„╚╦▒Š¾w╔ŽŻ¼Č°╩Ūė├ė┌╚½ł÷Š░▒OęĢŻ¼▀@śė┤¾┤¾Ž▐ųŲ┴╦▀b▓┘ū„ÖCŲ„╚╦Ą─╗Ņäėł÷╦∙ĪŻ╬─½I╠ß│÷ęŲäėÖCŲ„╚╦╗∙ė┌ųŪ─▄¾wĄ─┐žųŲĘĮĘ©Ż¼┐╔╩╣ęŲäėÖCŲ„╚╦Š▀ėąę╗Č©Ą─ūįų„╣”─▄Ż¼Ą½╩Ūø]ėąī”ūįų„┐žųŲ║═▀b▓┘ū„š▀Ą─┐žųŲ▀MąąĮy╗I┐╝æ]ĪŻ
ßśī”╔Ž╩÷┤µį┌Ą─å¢Ņ}Ż¼▒Š╬─įOėŗ┴╦ę╗ĘNŠ▀ėąėč║├╚╦ÖCĮń├µĄ─╗∙ė┌║Žū„┐žųŲĄ─▀b▓┘ū„ÖCŲ„╚╦ŽĄĮyĪŻŲõ╠ž³c╩ŪŻ║╚╦ÖCĮń├µ’@╩ŠĄ─ā╚╚▌žSĖ╗Ż¼ßśī”▓╗═¼Ą─╚╬䚯¼ŁhŠ│╠ß╣®ČÓĘN▓┘ū„ĘĮ╩ĮŻ╗═©ėŹĘĮ╩Įņ`╗ŅĪóĮMŠWĘĮ▒ŃŻ╗╦∙▓╔ė├Ą─╗∙ė┌╚╦ÖC║Žū„Ą─ī¦║Į┐žųŲ┐╔┐┐ĪóĖ▀ą¦ĪŻ
1 ╚╦ÖCĮń├µįOėŗ
į┌▀b▓┘ū„ęŲäėÖCŲ„╚╦ŽĄĮyųąŻ«īŹ¼F▓┘ū„š▀▒OęĢĪó┐žųŲ▀b▓┘ū„ęŲäėÖCŲ„╚╦Ą─╣”─▄─ŻēK╩Ū╚╦ÖCĮń├µĪŻėč║├Ą─╚╦ÖCĮń├µæ¬įō▒M┐╔─▄žSĖ╗Ąž’@╩ŠęŲäėÖCŲ„╚╦╦∙╠ÄĄ─ŁhŠ│ą┼Žó║═ęŲäėÖCŲ„╚╦▒Š╔ĒĄ─ĀŅæBą┼ŽóŻ¼Č°ŪęōĒėą║Ž▀mĄ─▓┘ū„ĘĮ╩ĮŻ«ūī▓┘ū„╚╦åT─▄ē“▌p╦╔Īóėąą¦Ąž┐žųŲęŲäėÖCŲ„╚╦▀\äė▓ó═Ļ│╔╠žČ©Ą─╚╬äšĪŻ
1.1 ÖCŲ„╚╦Č╦ą┼Žó’@╩ŠĮń├µįOėŗ
▀b▓┘ū„š▀ų„ę¬╩ŪĖ∙ō■’@╩Šį┌▀b▓┘ū„Č╦Ą─ėŗ╦ŃÖC╔Žą┼ŽóüĒ┐žųŲęŲäėÖCŲ„╚╦Ż«×ķ┴╦▒Ńė┌▀b▓┘ū„š▀Ą─øQ▓▀║═┐žųŲŻ¼ę¬Ū¾╦∙’@╩ŠĄ─▀hČ╦ęŲäėÖCŲ„╚╦Ą─ĀŅæBą┼Žó║═Ą─ŁhŠ│ą┼Žó▒M┴┐žSĖ╗Īóų▒ė^ĪŻ
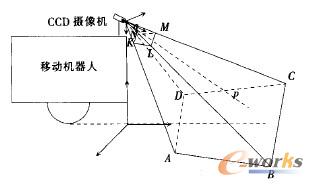
łD1╦∙╩Š×ķ▒Š▀b▓┘ū„ęŲäėÖCŲ„╚╦ųą╚╦ÖCĮń├µ╦∙’@╩ŠĄ─ą┼ŽóŻ║▀b▓┘ū„š▀┐╔ęįį┌Įń├µĄ─ū¾╔ŽĮŪ┐┤ĄĮęŲäėÖCŲ„╚╦╣żū„ŁhŠ│Ą─īŹĢręĢŅlą┼ŽóŻ¼ęŲäėÖCŲ„╚╦Ą─ĀŅæBą┼Žó(░³└©╦┘Č╚║═▐DĮŪ)ė├āx▒Ē▒PĄ─ĘĮ╩Į’@╩ŠŻ«ęŲäėÖCŲ„╚╦╝t═Ōé„ĖąŲ„Ą─ą┼Žóė├┐╔ęĢ╗»Ą─ĘĮ╩Į’@╩ŠĮń├µĄ─ėę╔ŽĮŪĪŻį┌Įń├µĄ─ĒöČ╦Ż¼’@╩Š├┐├ļ╦∙é„▌öłDŽ±Ą─ļöĄŻ¼─▄Ę┤æ¬═©ėŹĄ─ĀŅør╩Ūʱ┴╝║├Ż«▀Ć’@╩Š┴╦ų▒Įė┐žųŲĢr╦∙Ž┬▀_ĮoęŲäėÖCŲ„╚╦Ą─╦┘Č╚├³┴ŅųĄ║═▐DĮŪ├³┴ŅųĄĪŻ
łD1 ╚╦ÖCĮń├µ╦∙’@╩ŠĄ─ą┼Žó
1.2 ▀b┐žęŲäėÖCŲ„╚╦Ą─ĘĮ╩Į
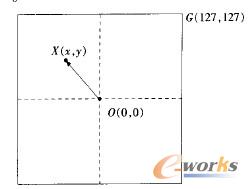
į┌▒Š▀b▓┘ū„ęŲäėÖCŲ„╚╦Ą─╚╦ÖCĮń├µųąŻ¼╠ß╣®┴╦╚²ĘN┐╔ęį┐žųŲęŲäėÖCŲ„╚╦Ą─ĘĮĘ©ĪŻūŅ║åå╬Ą─Š═╩Ū╩╣ė├µI▒P┐žųŲŻ¼═©▀^╩┬Ž╚įOų├Ą─¤ßµIŻ«┐╔ęįĘĮ▒ŃĄ─┐žųŲęŲäėÖCŲ„╚╦Ą─Ū░▀MĪó║¾═╦║═įŁĄžūį▐DĪŻŲõ┤╬╩Ū└¹ė├╩¾ś╦▀Mąą┐žųŲĪŻ▒Š╬─įOėŗ┴╦ę╗ĘN▓┘ū„▌p╦╔Ż¼┐žųŲņ`╗ŅĄ─ĘĮĘ©ĪŻĖ∙ō■į┌▀b▓┘ū„Č╦ėŗ╦ŃÖC╔Ž╦∙’@╩ŠĄ─Å─ęŲäėÖCŲ„╚╦Č╦é„üĒĄ─ęĢŅlą┼ŽóŻ«▀b▓┘ū„š▀į┌ęĢŅl’@╩Š┤░┐┌ųąė├╩¾ś╦ųĖČ©ęŲäėÖCŲ„╚╦Ą─▀\äė─┐ś╦³cŻ¼įO┤╦³c×ķdŻ¼Ė∙ō■╩¾ś╦Ą─╬╗ų├ą┼ŽóĄ├ĄĮŲõį┌ęĢŅlłDŽ±ū°ś╦ŽĄųąĄ─ū°ś╦ėø×ķ(xŻ¼y)ĪŻ╚ńłD2╦∙╩ŠŻ¼CCDözŽ±ÖCĄ─│╔Ž±─Żą═▓╔ė├tJ,µ▌L│╔Ž±─Żą═Ż¼Ž±ŲĮ├µĄ─╬╗ų├┐╔ė├KCMNŲĮ├µ▒Ē╩ŠŻ╗ė╔ė┌ęŲäėÖCŲ„╚╦╩Ūį┌ŲĮ├µ╔Ž▀\äėŻ¼╦∙ųĖČ©Ą──┐ś╦³cę▓į┌ŲĮ├µ╔ŽŻ«ę“┤╦─┐ś╦³c╬╗ė┌╩└Įńū°ś╦ŽĄŽ┬Ą─ABCDŲĮ├µųąĪŻėø³cdį┌özŽ±ÖCū°ś╦ŽĄŽ┬ī”æ¬Ą─│╔Ž±³c×ķqŻ¼Ųõū°ś╦ėø×ķ(rŻ¼t)Ż╗į┌╩└Įńū°ś╦ŽĄŽ┬Ą─ī”欳c×ķPŻ¼Ųõū°ś╦ėø×ķ(XŻ¼Y)ĪŻözŽ±ÖCū°ś╦ŽĄųąĄ─Ž±ŲĮ├µū°ś╦┼cęĢŅlłDŽ±ū°ś╦ų«ķg×ķ▒╚└²ĻPŽĄŻ¼ė├ŠžĻćM1▒Ē╩ŠŻ¼Ė∙ō■ąĪ┐ū│╔Ž±─Żą═Ż¼╩└Įńū°ś╦ŽĄŽ┬ŲĮ├µABCD┼cözŽ±ÖCū°ś╦ŽĄŽ┬Ž±ŲĮ├µKLMNĄ─ĻPŽĄė├°F▒Ē╩ŠĪŻ«öė├╩¾ś╦³c│÷dĢrŻ¼Ųõį┌╩└Įńū°ś╦ŽĄŽ┬ī”欳cPĄ─ū°ś╦(XŻ¼Y)═©▀^Ž┬╩ĮŪ¾Ą├Ż║

łD2│╔Ž±─Żą═
▓┘┐v╩ų▒·╩Ūę╗ĘNų▒ė^Ż¼╚▌ęū▒╗╚╦Įė╩▄Ą─╚╦ÖCĮ╗╗źįOéõĪŻ╣żū„į┌ų▒Įė┐žųŲ─Ż╩ĮĢrŻ«ī”ęŲäėÖCŲ„╚╦Ą─ąąū▀Īó▐DÅØĪóŪ░▀MĪó║¾═╦Ą─▀\äė┐žųŲŻ¼Č╝┐╔ęį╩╣ė├▓┘┐v╩ų▒·īŹ¼FĪŻ«ö╩╣ė├▓┘┐v╩ų▒·┐žųŲĢrŻ¼Ž╚▓╔╝»ĄĮ▓┘ū„╩ų▒·Ą─╬╗ų├ą┼Žó(XŻ¼Y)Ż¼╚ńłD3╦∙╩ŠĘųŻ¼╚╗║¾▓╔╝»▓┘ū„╩ų▒·Ą─╗¼ēKą┼ŽóuĪŻė├╬╗ų├ą┼Žó┐žųŲęŲäėÖCŲ„╚╦Ą─▐DĮŪŻ«ė├╗¼ēKą┼Žó┐žųŲęŲäėÖCŲ„╚╦Ą─╦┘Č╚ĪŻė╔ė┌Å─▓┘ū„╩ų▒·▓╔╝»ĄĮĄ─įŁ╩╝ą┼╠¢įļ┬Ģ▌^┤¾Ż¼ę“┤╦▓╔ė├┴╦╩Į(2)║═╩Į(3)Ą─Š∙ųĄ×V▓©Ż¼üĒæ]│²įļ┬ĢĪŻ
łD3ė╬æ“ŚU├³┴Ņ╩ŠęŌłD
ĮY║ŽęŲäėÖCŲ„╚╦Ą─▀\äė─▄┴”Ż¼īóŠĆąį┐sĘ┼ĄĮ[6Ż¼130]Ż¼ĮY║Ž╬╗ų├ą┼ŽóųąĄ─yųĄŻ¼└¹ė├ĘĮ│╠(4)Ū¾Ą├ęŲäėÖCŲ„╚╦Ą─╦┘Č╚├³┴Ņv(å╬╬╗Ż║cmŻ»s)Ż╗Ą├ĄĮ×V│²įļ┬Ģ║¾Ą─(XŻ¼Y)║¾Ż¼═©▀^ĘĮ│╠╩Į(5)Ū¾Ą├ęŲäėÖCŲ„╚╦Ą─▐DĮŪ├³┴Ņφ(å╬╬╗Ż║Č╚)Ż¼╚╗║¾ų▒Įėīó╦┘Č╚├³┴Ņ║═▐DĮŪ├³┴Ņ░l╦═ĮoęŲäėÖCŲ„╚╦ĪŻ

2 ▀h│╠═©ą┼ĘĮ╩Į╝░īŹ¼F
į┌▀b▓┘ū„š▀║═ęŲäėÖCŲ„╚╦ų«ķgĄ─ą┼Žóé„▌ö╝╚┐╔ęį▓╔ė├īŻė├Ą─═©ėŹįOéõ[61Ż¼ę▓┐╔ęįĮĶų·╣½ė├═©ėŹŠWĮjĪŻ¼Fį┌Ż¼¤oŠĆ═©ą┼ĘĮ╩Įų„ę¬ėą802Ż«11ĪóBluetooth║═HomeRFĄ╚Ż¼¤oŠĆŠųė“ŠWLAN802Ż«11╝╝ągį┌ąį─▄ĪóārĖ±Ė„ĘĮ├µŠ∙│¼▀^┴╦BluetoothĪóHomeRFĄ╚╝╝ągĪŻė╔ė┌IntranetĄ─Ųš╝░║═ęŲäėÖCŲ„╚╦╣żū„ĘĮ╩ĮĄ─ę¬Ū¾Ż«į┌▒Š╬─įOėŗĄ─ŽĄĮyųąŻ¼═©ą┼─ŻēK▓╔ė├┴╦¤oŠĆŠųė“ŠWĄ─802Ż«11b╝╝ągĪŻŲõąį─▄┐╔ØMūŃ▀b▓┘ū„ęŲäėÖCŲ„╚╦Ą─═©ą┼ę¬Ū¾Ż¼Š▀ėą┴╝║├Ą─═©ė├ąįŻ¼ĘĮ▒Ń═©ą┼ŠWĮjĮė┐┌Ą─ŠÄ│╠īŹ¼FĪŻ
IEEE 802Ż«11╩Ūė╔IEEEūŅ│§ųŲėåĄ─¤oŠĆŠųė“ŠWś╦£╩ŽĄ┴ąĪŻ╩Ū¼Fį┌╩╣ė├Ą─ūŅČÓĄ─¤oŠĆé„▌öģfūhŻ¼¼Fį┌╩ął÷╔ŽĄ─Ė„ĘN¤oŠĆŠW┐©┤¾ČÓČ╝ų¦│ųIEEE 802Ż«1lbĪŻ╚╬║╬Šųė“ŠWæ¬ė├ĪóŠWĮj▓┘ū„ŽĄĮy╗“ģfūh(╚ń╗ź┬ōŠWģfūhTCPŻ»IP)Č╝┐╔ęįį┌Ę¹║Ž802Ż«11ŽĄ┴ąęÄĘČĄ─WLAN╔Ž▀\ąąŻ¼▀@ę▓║å╗»┴╦ŠÄ│╠īŹ¼FŻ¼▓óŪęį÷ÅŖ┴╦ŽĄĮyĄ─╝µ╚▌ąį║══©ė├ąįĪŻIEEE 802Ż«1lbĄ─ūŅ┤¾öĄō■é„▌ö╦┘┬╩×ķ11MbpsŻ«ę▓┐╔Ė∙ō■ą┼╠¢ÅŖ╚§░čé„▌ö┬╩ūįäėš{š¹×ķ5Ż«5MbpsĪó2Mbps║═1MbpsĦīÆĪŻ«öęŲäėÖCŲ„╚╦▓╔╝»CIFĖ±╩Į(352x288)┤¾ąĪĄ─łDŽ±ĢrŻ¼▓╔ė├JPEGē║┐sŻ¼Ä¦īÆ┐╔ęįØMūŃęĢŅlīŹĢré„▌öĄ─ę¬Ū¾(├┐├ļé„▌öĄ─łDŽ±│¼▀^10ļ)ĪŻį┌¤oŠĆų▒ŠĆé„▓źé„▌öĘČć·×ķ╩ę═ŌūŅ┤¾300n1Ż«╩ęā╚ėąšŽĄKĄ─ŪķørŽ┬ūŅ┤¾100mĪŻ
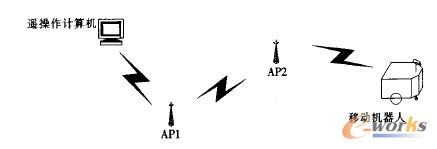
¤oŠĆŠWĮjĄ─╗∙▒Š┼õéõ░³└©¤oŠĆŠW┐©╝░AP(Access Point)ĪŻAPŠ═╚ńę╗░ŃėąŠĆŠWĮjĄ─HubŻ¼┐╔ęį┐ņ╦┘Ūę▌pęūĄž┼cęčėąĄ─IntranetŽÓ▀BŻ¼Č°Ūę┐╔ęįīŹ¼F¤o┐p┬■ė╬ĪŻ└¹ė├ęčėąĄ─ėąŠĆŠWĮjŻ¼į┌╦∙ąĶꬥ─╬╗ų├░▓Ę┼ūŃē“Ą─APŻ¼┐╔ęįį┌ę╗éĆ║▄┤¾Ą─ĘČć·ā╚▀b▓┘ū„┐žųŲęŲäėÖCŲ„╚╦Ż¼╚ńłD4╦∙╩ŠĪŻ┴Ē═ŌŻ¼▀b▓┘ū„ėŗ╦ŃÖCĪóAPĪóęŲäėÖCŲ„╚╦┐╔ęį¬Ü┴óĮMŠWŻ¼▀m║Ž╚╬║╬Ąž├µŲĮ╠╣Ż¼ęŲäėÖCŲ„╚╦─▄▀\äėĄ─ŁhŠ│Ż¼╚ńłD5╦∙╩ŠĪŻ
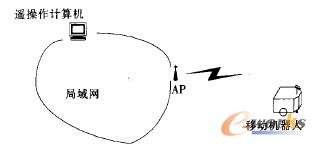
łD4ĮĶų·InteranetĄ─═©ėŹ▀BĮė
łD5¬Ü┴óĄ─═©ėŹ▀BĮė
3 ╚╦ÖC║Žū„┐žųŲ
ęŲäėÖCŲ„╚╦Š▀ėąČÓéĆūėŽĄĮyŻ¼ŪęūėŽĄĮy╬╗ė┌▓╗═¼Ą─īė┤╬╔ŽŻ¼ī”ė┌Ė„éĆīė┤╬ėąų°▓╗═¼Ą─┐žųŲę¬Ū¾Ż¼ĮŌøQĘĮ░ĖėąĘųīėĄ─┐žųŲĘĮĘ©Ż¼╗∙ė┌┐žųŲą┼Žó╚┌║ŽĄ─ĘĮĘ©äéĪŻ
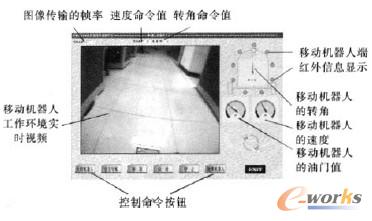
į┌▀b▓┘ū„ęŲäėÖCŲ„╚╦ųąŻ¼ęŲäėÖCŲ„╚╦╣żū„į┌▀b▓┘ū„š▀Ą─┐žųŲų«Ž┬Ż¼╝┤ę¬╩╣ęŲäėÖCŲ„╚╦£╩┤_ĄžīŹ¼F▀b▓┘ū„š▀Ą─ęŌłDŻ¼ėųę¬Ū¾ęŲäėÖCŲ„╚╦Š▀ėąę╗Č©Ą─ųŪ─▄Ż¼─▄▀mæ¬äėæBŁhŠ│║═╠Ä└Ē═╗░l╩┬╝■ĪŻ×ķ┴╦Ė³║├Ąžģfš{▀b▓┘ū„š▀╦∙░l│÷Ą─┐žųŲ├³┴Ņ║═ęŲäėÖCŲ„╚╦ūį╔Ē╗∙ė┌ŁhŠ│ą┼ŽóĄ─ūįų„ąą×ķŻ¼╠ß│÷┴╦ę╗ĘN╚ńłD6╦∙╩ŠĄ─╚╦ÖC║Žū„┐žųŲĘĮĘ©ĪŻ
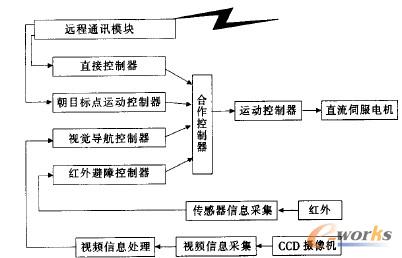
łD6╚╦ÖC║Žū„┐žųŲ
ßśī”▓╗═¼īė┤╬╔ŽĄ─Ė„ūėŽĄĮyŻ¼ĘųäeįOėŗŽÓæ¬Ą─┐žųŲŲ„Ż¼├┐éĆ┐žųŲŲ„Ą─▌ö│÷Č╝×ķų▒Įė┐žųŲęŲäėÖCŲ„╚╦▀\äėĄ─╦┘Č╚ųĖ┴Ņ║═▐DĮŪųĖ┴ŅĪŻę╗╣▓įOėŗ┴╦╚ńŽ┬╦─éĆ┐žųŲŲ„Ż║ų▒Įė┐žųŲŲ„Ż¼│»─┐ś╦³c▀\äė┐žųŲŲ„Ż«ęĢėXī¦║Į┐žųŲŲ„║═╝t═Ō▒▄šŽ┐žųŲŲ„ĪŻ
(1)ų▒Įė┐žųŲŲ„Įė╩š▀b▓┘ū„š▀Ž┬▀_ĮoęŲäėÖCŲ„╚╦Ą─╦┘Č╚├³┴Ņ║═▐DĮŪ├³┴ŅŻ¼ęį╝░╩Ūʱī”ęŲäėÖCŲ„╚╦īŹ╩®ÅŖąą┐žųŲŻ¼╚ń╠Äė┌ÅŖąą┐žųŲ─Ż╩ĮĢrĪŻŲõ╦¹┐žųŲŲ„Ą─▌ö│÷īó▓╗Ųū„ė├Ż╗
(2)│»─┐ś╦³c▀\äė┐žųŲŲ„Įė╩šĄĮęŲäėÖCŲ„╚╦æ¬ĄĮ▀_Ą──┐ś╦³c║¾Ż¼ĮY║ŽęŲäėÖCŲ„╚╦«öĢrĄ─╦┘Č╚║═╬╗ų├Ż¼Ū¾│÷ÖCŲ„╚╦æ¬įōł╠ąąĄ─╦┘Č╚║═▐DĮŪŻ║
(3)ęĢėXī¦║Į┐žųŲŲ„ät└¹ė├ęĢŅlą┼Žó╠Ä└Ē─ŻēKĄ─▌ö│÷Ż¼½@ų¬«öĢrĄ─ŁhŠ│ą┼ŽóŻ¼╚ń╣¹ØMūŃęĢėXī¦║ĮĄ─ęÄätŻ¼ät▌ö│÷┐žųŲ├³┴ŅŻ║
(4)╝t═Ō▒▄šŽ┐žųŲŲ„Ė∙ō■╦∙╩šĄĮĄ─╝t═Ōą┼ŽóŻ¼īŹ╩®ūŅāץ─▒▄šŽ┤ļ╩®Ż¼░l│÷ī”ÖCŲ„╚╦Ą─┐žųŲ├³┴ŅĪŻ
į┌╔Ž╩÷╦─éĆ┐žųŲŲ„īė┤╬ų«╔ŽĄ─║Žū„┐žųŲŲ„ę└ō■╩┬Ž╚įOČ©Ą─ā׎╚╝ē║═Ė„éĆ┐žųŲŲ„Ą─▌ö│÷ī”▓┘ū„š▀ęŌłD║═ŁhŠ│Ą─Ųź┼õ│╠Č╚Ż¼▀xė├ŽÓæ¬┐žųŲŲ„Ą─▌ö│÷ū„×ķš¹éĆ┐žųŲŽĄĮyĄ─▌ö│÷Ż¼▓ó▌ö│÷ĄĮ▀\äė┐žųŲŲ„ĪŻ
4 Š▀¾wīŹ¼F║═īŹ“×
▒Š╬─╦∙ė├īŹ“×ŲĮ┼_×ķūįąąčąųŲķ_░lĄ─ÖCŲ„╚╦AIM(Advanced Intelligent Mobile Robot)Ż«╚ńłD7╦∙╩ŠĪŻįōęŲäėÖCŲ„╚╦▓╔ė├ļp▌å▓Ņ╦┘“īäėŻ¼Ū░├µėąę╗¤oäė┴”ī¦Ž“▌åĪŻęŲäėÖCŲ„╚╦▒Š¾wīÆ40cmŻ¼Ė▀49cmŻ¼ūŅ┤¾ķLČ╚40.5cmŻ¼čbėąę╗éĆ▓╩╔½CCDözŽ±ÖC║═9éĆ╝t═Ōé„ĖąŲ„ĪŻ┼õėą¤oŠĆŠW┐©Ż¼═©▀^AP║═▀b┐žČ╦ŽÓ▀BĪŻį┌▄ø╝■╔Ž▓╔ė├├µŽ“ī”Ž¾Ą─╝╝ągŻ¼ęĢŅlą┼ŽóĄ─▓╔╝»Īóē║┐sĪóĮŌē║┐sČ╝Ė„ūįĘŌčb│╔ŅÉŻ¼▓óķ_▒┘¬Ü┴óĄ─ŠĆ│╠Ż╗ęŲäėÖCŲ„╚╦Ą─┐žųŲĪóŠWĮj═©ėŹ║═é„ĖąŲ„ą┼ŽóĄ─╠Ä└ĒĪŻĘųäeė├▓╗═¼Ą─ŅÉīŹ¼FĪŻ
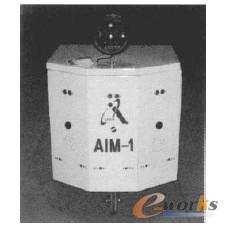
łD7ęŲäėÖCŲ„╚╦AIM
į┌łD8╦∙╩ŠĄ─š╣╩Š┤¾ÅdųąŻ¼A╠Ä▀b▓┘ū„┐žųŲėŗ╦ŃÖCĪóB╠ÄĄ─AP║═ęŲäėÖCŲ„╚╦CĮM│╔¬Ü┴óĄ─ŠWĮjŽĄĮyŻ¼ę╗éĆ╬┤Įø▀^ė¢ŠÜĄ─▓┘ū„╚╦åT(ģóė^š▀)į┌A╠Ä┐╔ęįė├ė╬æ“ŚUĒś└¹Ąž▓┘ū„ÖCŲ„╚╦└@ł÷č▓ė╬ę╗╚”ĪŻ
łD8įć“×1
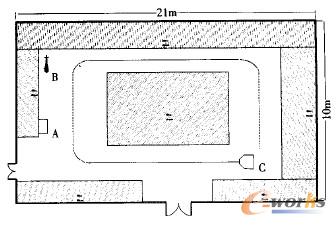
į┌łD9╦∙╩ŠĄ─▐k╣½╩ęŁhŠ│ųąŻ¼š¹éĆśŪĄ└ķL╝s80mŻ¼īÆ2mŻ¼╦∙▀M│÷Ę┐ķgķTĄ─īÆČ╚×ķ0.85m▀b▓┘ū„š▀į┌A╠Ä┐╔ęįė├µI▒P┐žųŲĄ─ĘĮ╩ĮŻ¼╗“╩¾ś╦┐žųŲĄ─ĘĮ╩ĮŻ¼╗“▓┘┐v╩ų▒·┐žųŲĄ─ĘĮ╩Į┐žųŲęŲäėÖCŲ„╚╦BĄĮ▀_C╠Ä▓óĘĄ╗žĄĮA╠ÄĪŻ
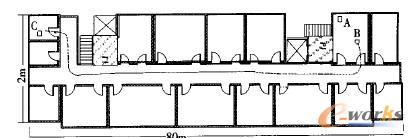
łD9įć“×2
5 ĮYšō
▒Š╬─ų„ę¬Å─╚╦ÖCĮń├µŻ¼ų„Å─Č╦═©ėŹŻ¼ęŲäėÖCŲ„╚╦Ą─┐žųŲĘĮ├µėæšō┴╦ęŲäėÖCŲ„╚╦Ą─▀b▓┘ū„┐žųŲŻ¼╠ß│÷┴╦ę╗ĘN╚╦ÖC║Žū„┐žųŲĄ─▀b▓┘ū„ÖCŲ„╚╦┐žųŲŲ„Ą─įOėŗĘĮĘ©Ż¼═©▀^╚╦ÖC║Žū„īóŁhŠ│Ėąų¬Īó╚╬äšęÄäØĪó├³┴Ņł╠ąąīŹĢrĄžĮY║ŽŲüĒĪŻ╦∙įOėŗĄ─▀b▓┘ū„ęŲäėÖCŲ„╚╦Š▀ėąķ_Ę┼Ą─ĮYśŗŻ¼╚╦ÖCĮń├µā╚╚▌žSĖ╗Ż¼▓┘ū„ĘĮ▒ŃŻ¼Ūęų„Å─Č╦Ą─═©ėŹĮMŠW║åå╬ĪŻīŹ“×ūC├„┤╦▀b▓┘ū„ÖCŲ„╚╦▀\ąąŲĮĘĆ┐╔┐┐Īó┐žųŲņ`╗ŅŻ«─▄ē“į┌╬ŻļUŁhŠ│Ž┬▀b┐žū„śIĄ╚ŅIė“░lō]ū„ė├ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║Š▀ėąėč║├╚╦ÖCĮń├µ▀b▓┘ū„ęŲäėÖCŲ„╚╦Ą─║Žū„┐žųŲ
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/solutions/14019310729.html