ū„×ķÖCļŖę╗¾w╗»Ą─Ąõą═«aŲĘŻ¼ÖCŲ„╚╦į┌║▄ČÓŅIė“’w╦┘░lš╣Ż¼╩└ĮńĖ„ć°ęčĮøčąųŲ│╔╣”┴╦æ¬ė├ė┌ųŲįņśIĪó┐▒╠ĮĪóŖ╩śĘĪó▄Ŗ╩┬Īóßt»¤ūo└ĒĄ╚ŅIė“Ą─ĘNŅÉĘ▒ČÓĄ─ųŪ─▄ÖCŲ„╚╦ĪŻßt»¤ÖCŲ„╚╦ė╚Ųõ╩Ūæ¬ė├ė┌═Ō┐ŲŅIė“Ą─▌oų·╩ųągÖCŲ„╚╦ęčĮø│╔×ķć°ā╚═Ō蹊┐¤ß³cŻ¼╩╣ė├ÖCŲ„╚╦▌oų·═Ō┐Ų╩ųągīó│╔×ķę╗ĘN▒ž╚╗Ą─░lš╣┌ģä▌ĪŻ═Ō┐Ų▌oų·╩ųągÖCŲ„╚╦ŽĄĮy─▄ē“│õĘų└¹ė├ßtīW║═╣ż│╠īWĄ─Ė„ūįā×ä▌Ż¼ūŅ┤¾╗»╚╦ÖCģfū„─▄┴”Ż¼śO┤¾╠ßĖ▀ßt»¤Ą─£╩┤_ąį║═▒ŻūCų╬»¤Ą─Ė▀┘|┴┐Ż¼┤┘▀MöĄūų╗»═Ō┐ŲĄ─░lš╣ĪŻ¼FĮY║Žć°ā╚═ŌŽÓĻP╣ż│╠╝╝ąg╝░┼R┤▓蹊┐ŪķørŻ¼Š══Ō┐Ų▌oų·╩ųągÖCŲ„╚╦Ą─░lš╣Īó蹊┐┼cæ¬ė├¼FĀŅĪó╣▓ąįĻPµI╝╝ągĪó░lš╣┌ģä▌▀Mąą║åę¬Ė┼╩÷ĪŻ
ę╗Īó═Ō┐Ų▌oų·╩ųągÖCŲ„╚╦Ė┼╩÷
ÖCŲ„╚╦─▄▓┐Ęų┤·╠µ╚╦ŅÉĄ─╗ŅäėŻ¼Ūę┼cūį╚╗╚╦ŽÓ▒╚ėąų°Š▐┤¾Ą─ā×ä▌ĪŻ╚ńßtĤāH┐┐╚╦╣ż▓┘ū„╠Ä└ĒČ©┴┐ą┼Žó─▄┴”ėąŽ▐Ż¼Ūęęū╩▄ĄĮ▌Ś╔õ║═Ėą╚ŠĄ─ė░ĒæĪŻÖCŲ„╚╦Š▀ėą▌^Ė▀Ą─╝»║Ž▀\äėŠ½Č╚Īó┐╔ĘĆČ©▀\ąąŪę▓╗Ģ■ŲŻä┌Ż¼╠Ä└ĒöĄō■─▄┴”ÅŖŻ¼ę▓▓╗▒žō·ą─▌Ś╔õ┼cĖą╚ŠĄ─ė░ĒæŻ¼Ūę£ńŠ·ĘĮ▒ŃĪŻ
╩ųągÖCŲ„╚╦ĮĶų·ėŗ╦ŃÖC┐žųŲ╝╝ągŻ¼╩®ąą░ą³cČ©╬╗Īó╦Ä╬’ūó╚ļĪóōpܦ▓ĪįŅĄ╚╩ųąg╚╬äšĪŻ─┐Ū░Ż¼╩ųągÖCŲ„╚╦Ą─蹊┐ų„ę¬╝»ųąį┌═Ō┐Ų╩ųągÖCŲ„╚╦Īó┐ĄÅ═ÖCŲ„╚╦ĪóĘ■äšÖCŲ„╚╦┼cūo└ĒÖCŲ„╚╦Ą╚ĘĮ├µŻ¼Č°╩╣ė├ūŅÅVĘ║Ą─╩Ū═Ō┐Ų╩ųągÖCŲ„╚╦ĪŻŠ═─┐Ū░Ą─Ę■äšÖCŲ„╚╦┼cūo└ĒÖCŲ„╚╦Ą╚ĘĮ├µŻ¼Č°╩╣ė├ūŅÅVĘ║Ą─╩Ū═Ō┐Ų╩ųągÖCŲ„╚╦ĪŻŠ═─┐Ū░Ą─┐ŲīW╝╝ąg░lš╣╦«ŲĮŻ¼║▄ļyū÷ĄĮ═Ļ╚½ė├ßt»¤ÖCŲ„╚╦┤·╠µßtĤ╩ųągŻ¼ų╗╩Ū╠ß╣®┴╦╣”─▄ÅŖ┤¾Ą─▓┘ū„╣żŠ▀ęį┐╦Ę■é„ĮyĄ─═Ō┐Ų╩ųągČ©╬╗Š½Č╚▓╗Ė▀Īó╩ųągĢrķg▀^ķLĪóągš▀ęūŲŻä┌┼cŅØČČĪó╚▒Ę”╚²ŠSßtīWłDŽ±ī¦║ĮĄ╚╝╝ąg╚▒Ž▌ĪŻ
Ż©ę╗Ż®╩╣ė├ÖCŲ„╚╦▌oų·═Ō┐Ų╩ųągĄ─ā׳c
1.£╩┤_Č©╬╗Īó╬óäō▓┘ū„Ż║ÖCŲ„╚╦Ą─šŅØ▀^×VŽĄĮy╝░äėū„┐s£pŽĄĮy┐╔īó╩ųągŠ½Č╚╠ßĖ▀ĄĮüå║┴├ū╝ēĪŻ
2.£p▌pßtĤŲŻä┌Ż║▒▄├Ō╚╦×ķę“╦žÄ¦üĒĄ─ęŌ═Ōōpé¹Ż¼┤¾┤¾╠ßĖ▀╩ųąg░▓╚½ąįĪŻ
3.į÷ÅŖņ`Ū╔ąįŻ║ČÓūįė╔Č╚Ą─ÖCąĄ╩ųį÷ÅŖßtĤ▓┘ū„Ą─ņ`Ū╔ąįĪŻ
4.ų▒ė^Ż║ÖCŲ„╚╦▒OęĢŽĄĮyé„│÷Ą─╚²ŠSłDĮoągš▀ĦüĒĖ³ų▒ė^Ą─ą┼ŽóĘ┤üĪŻ
5.ągŪ░£╩éõ│õĘųŻ║┐╔▀MąąągŪ░┐ņ╦┘╩ųągįOėŗĪóĘ┬šµŻ¼īŹĢrĄž─ŻöM╩ųąg▀^│╠Ż¼ī”ągš▀▀Mąą╩ųąg╝╝─▄┼Óė¢ĪŻ
6.ßt»¤╝╝ągŲš╝░Ż║┐╔īŹ¼F«ÉĄž▀h│╠╩ųąg▓┘ū„Ż¼ėąų·ė┌ßt»¤╝╝ągĄ─Ųš╝░ĪŻ
Ż©Č■Ż®ÖCŲ„╚╦▌oų·═Ō┐Ų╩ųąg蹊┐¼FĀŅ┼cĄõą═æ¬ė├
ė╔ė┌═Ō┐Ų▌oų·╩ųągÖCŲ„╚╦į┌╩ųągęÄäØĪóŠ½┤_Č©╬╗Īó╬óäō╩ųągĪó▀h│╠╩ųągĪó╠ōöM╩ųągĘ┬šµ┼c┼Óė¢Īóą┬ą═į\»¤ĘĮ░Ė┼cųŪ─▄╩ųągŲ„ąĄĄ╚ĘĮ├µėą¬Ü╠žĄ─ā×ä▌Ż¼╦∙ęįį┌╬óäō═Ō┐ŲĪóĖ╬─æ═Ō┐ŲĪó╣Ū┐ŲĪó┐┌Ū╗ŅM├µ═Ō┐ŲĪó├┌─“═Ō┐ŲĪóą─č¬╣▄═Ō┐Ųęį╝░Ū╗ńR═Ō┐ŲĄ╚═Ō┐ŲČÓŅIė“Ą─蹊┐╚ĪĄ├┴╦ųž┤¾▀Mš╣Ż¼▓óŪęę▓ķ_╩╝ųØuį┌┼R┤▓═ŲÅVæ¬ė├ĪŻ
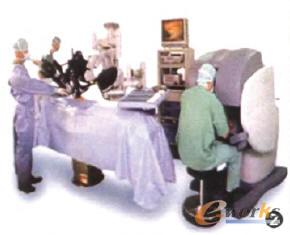
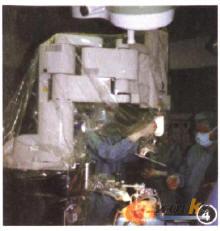
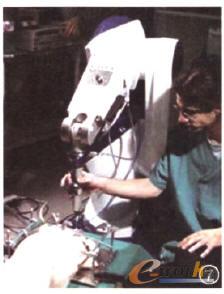
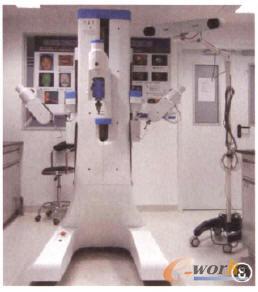
─┐Ū░╬óäō═Ō┐Ų╩ųągÖCŲ„╚ļų„ę¬æ¬ė├į┌├┌─“═Ō┐ŲĪóĖ╣Ū╗═Ō┐ŲĪóąžŪ╗═Ō┐ŲĄ╚ßtė├ŅIė“ĪŻ1987─ĻĘ©ć°ßt╔·Mouret│╔╣”īŹ╩®┴╦╩└Įń╩ū└²Ė╣Ū╗ńR─æ─ęŪą│²ągĪŻį┌20╩└╝o║¾Ų┌Ż¼ęįĖ╣Ū╗ńR╩ųąg×ķ┤·▒ĒĄ─╬óäō═Ō┐Ų░lš╣čĖ├═ĪŻ1996─Ļ├└ć°čąųŲ│÷ZeusÖCŲ„╚╦ŽĄĮyŻ¼ų„ę¬æ¬ė├ė┌╬óäōé¹╩ųągŻ©łD1Ż®ĪŻ├└ć°ßtĤ└¹ė├ZeusŽĄĮy═Ļ│╔┴╦ų°├¹Ą─│¼▀h│╠─æ─ꚬ│²╩ųąg“┴ų░ū╩ųąg”ĪŻ2001─Ļ├└ć°ķ_░lĄ─DaVinci═Ō┐Ų╩ųągÖCŲ„╚╦ŽĄĮyŻ©łD2Ż®Ż¼įōŽĄĮy╩Ū─┐Ū░╔┘öĄ─▄╔╠ŲĘ╗»Ą─═Ō┐Ų╩ųągÖCŲ„╚╦ŽĄĮyŻ¼Š▀ėąßtĤ┐žųŲŲĮ┼_║═Ė„ĘN╩ųągŲ„ąĄĪóČÓ╣”─▄╩ųąg┤▓┼cłDŽ±╠Ä└ĒįOéõĪŻįōŽĄĮy┐╔×ķßtĤ╠ß╣®═¼ķ_Ę┼╩Į╩ųągę╗śėĄ─ų▒ėX┐žųŲĪó▀\äėĘČć·║═ĮM┐Ś╠Ä└Ē─▄┴”Ż¼ŽĄĮy▀ĆŠ▀ėąūįäė╝mÕe╣”─▄Ż¼─▄┐╦Ę■ßtĤį┌▓┘┐v┐žųŲŲ„Ģr╩ų▒█Ą─ŅØČČŻ¼▒▄├Ō│÷¼FÕeš`▓┘ū„ĪŻ╠ņĮ“┤¾īWčąųŲ┴╦“├Ņ╩ų”ÖCŲ„╚╦Ż¼╣■Ā¢×I╣żśI┤¾īWĄ╚å╬╬╗ę▓ķ_š╣┴╦ŅÉ╦ŲĄ─蹊┐╣żū„ĪŻ▒▒Š®└Ē╣ż┤¾īWĄ╚å╬╬╗čąųŲĄ─│¼┬Ģī¦║Į╬ó▓©Ž¹╚┌╩ųągÖCŲ„╚╦ŽĄĮyŻ¼ė╔╬ó▓©Ž¹╚┌╩ųągÖCŲ„╚╦Īó│¼┬ĢłDŽ±ī¦║Į║═Č©╬╗╚²éĆūėŽĄĮyĮM│╔Ż©łD3Ż®ĪŻ═©▀^½@╚ĪĖ╬┼K╠žš„ĮM┐ŚłDŽ±Ż¼▓óīó«öŪ░╗╝š▀īŹ¾wĀŅæB┼cų╬»¤Ū░½@Ą├Ą─╚²ŠS│¼┬ĢłDŽ±║═ų╬»¤ęÄäØĮY╣¹▀Mąą┼õ£╩Ż¼░┤ų╬»¤ęÄäØĄ─┬ĘÅĮ┐žųŲÖCŲ„╚╦▀MąąČ©╬╗┤®┤╠Ż¼═¼Ģr└¹ė├īŹĢr│¼┬ĢłDŽ±ī”ų╬»¤ęÄäØ┬ĘÅĮ▀MąąīŹĢrĖ³ą┬ĪŻ

łD1 ZeusÖCŲ„╚╦ŽĄĮy
łD2 DaVinci═Ō┐Ų╩ųągÖCŲ„╚╦ŽĄĮy

łD3 ╬ó▓©Ž¹╚┌╩ųągÖCŲ„╚╦ŽĄĮy
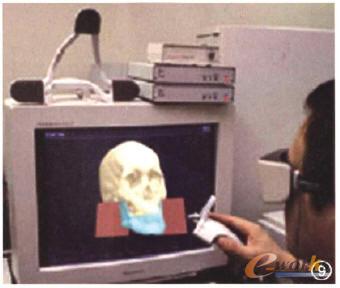
1992─Ļ═Ų│÷Ą─╔╠ŲĘ╗»«aŲĘRobo DocīŻė├╣Ū┐ŲÖCŲ„╚╦ŽĄĮyų„ę¬ė├ė┌ĻP╣Øų├ōQągųą▌oų·╣Ū„└║═╝┘¾wĄ─│╔ą╬ĪóČ©╬╗║═ų├╚ļĪŻėąčąŠ┐▒Ē├„ė╔Robo Doc▌oų·═Ļ│╔Ą─╩ųągą¦╣¹ų┴╔┘─▄▀_ĄĮé„Įy╩ųągĄ─╦«ŲĮŻ¼▓╗ąĶę¬┬■ķLĄ─īW┴Ģ▀^│╠▓óŪęį┌ągŪ░ęÄäØųąŠ▀ėąā×ä▌Ż©łD4Ż®ĪŻ╚Ąõė┌20╩└╝o90─Ļ┤·─®└¹ė├┼R┤▓╔ŽÅVĘ║╩╣ė├Ą─Cą═▒█ŽĄĮyčą░l┴╦PinTrace╣Ū┐Ų╩ųągīŻ╝ꎥĮyŻ¼ĮŌøQė╔ągŪ░CTÆ▀├Ķįņ│╔Ą─ķLĢrķgÅ═ļs┼õ£╩å¢Ņ}Ż©łD5Ż®ĪŻSpinebotÖCŲ„╚╦ŽĄĮyŻ©łD6Ż®┐╔ęį▌oų·ßtĤ═Ļ│╔ī”╝╣ūĄĄ─Ń@┐ū╣╠Č©Ż¼═Ļ│╔▓ĪįŅ┤®┤╠║═╩ųągī¦║ĮĄ╚╣żū„ĪŻ┤╦═ŌĄõą═Ą─ŽźĻP╣Ø═Ō┐ŲÖCŲ„╚╦▀ĆėąAcrobotŽĄĮyĪóMarsÖCŲ„╚╦ŽĄĮyĪóCrigosÖCŲ„╚╦Ą╚ĪŻ
łD4 īŻė├╣Ū┐ŲÖCŲ„╚╦ŽĄĮy-Roho DoeÖCŲ„╚╦ŽĄĮy

łD5 ╣Ū┐Ų╩ųągÖCŲ„╚╦ŽĄĮy-PinTrare╣Ū┐Ų╩ųągīŻ╝ꎥĮy

łD6 ╣Ū┐Ų╩ųągÖCŲ„╚╦ŽĄĮy-Spinebot╝╣ų∙╩ųąg┬▌ßöų▓╚ļŽĄĮy
į┌’BŅM├µ═Ō┐ŲÖCŲ„╚╦ĘĮ├µŻ¼Ą┬ć°║ŻĄ┬▒ż┤¾īWķ_░l│÷ė├ė┌’BŅM├µ═Ō┐Ų╩ųągĄ─ÖCŲ„╚╦Ż©łD7Ż®Ż¼įōŽĄĮy┐╔ė├üĒ▓Õ▀MäéąįĄ─ī¦╣▄╗“į┌Ņ^’B╔ŽĘNų▓╣Ūų¦╝▄ĪŻ─┐Ū░įōŽĄĮyęčĮøķ_š╣äė╬’ži║═╩¼¾wīŹ“ׯ¼╔ą╬┤æ¬ė├ė┌┼R┤▓ĪŻ▒▒Š®┤¾īW┐┌Ū╗ßtīWį║·┐┌Ū╗ßtį║┼c▒▒Š®└Ē╣ż┤¾īWĄ╚å╬╬╗║Žū„čąųŲ│÷ć°ā╚Ą┌ę╗╠ū’BŅM├µ═Ō┐Ų▌oų·╩ųągÖCŲ„╚╦ŽĄĮyŻ©łD8Ż®Ż¼īŹ¼FągŪ░╩ųągįOėŗ┼cęÄäØĪóągųąīŹĢrī¦║ĮĪóÖCŲ„╚╦▌oų·Č©╬╗░č│ųęį╝░ąg║¾įu╣└ĪŻįōŽĄĮy░³└©ągš▀▓┘ū„┼_║═ÖCŲ„╚╦╩ųąg┼_Ż¼ągš▀▓┘ū„┼_░³└©┴”Ę┤üų„┐ž▓┘ū„Ų„Īó┐žųŲ├µ░ÕĪó╚²ŠS┴ó¾włDŽ±’@╩ŠŽĄĮy╝░ėŗ╦ŃÖC┐žųŲŽĄĮyĪŻ═©▀^ī¦║ĮūėŽĄĮyīó╩ųąg¼Fł÷║═ągŪ░╩ųągęÄäØ▀Mąą┼õ£╩Ż¼▀MČ°ę²ī¦ÖCąĄ▒█▀Mąą╩ųąg▓┘ū„ĪŻ
łD7 Ą┬ć·’BŅM├µ═Ō┐Ų╩ųągÖCŲ„╚╦
łD8 ’BŅM├µ═Ō┐Ų▌oų·╩ųągÖCŲ„╚╦ŽĄĮy
1999─ĻĄ┬ć°░ž┴ųūįė╔┤¾īWĄ─NeumannĄ╚═©▀^╩╣ė├ļŖ─Xė╬æ“▓┘┐vŚUīŹ¼F╠ōöM┐┌Ū╗ŅM├µ═Ō┐Ų╩ųąg┼Óė¢ŽĄĮyĄ─┴”Ę┤ü╣”─▄ĪŻ2000─ĻŽŃĖ█┤¾īWĄ─XiaĄ╚ķ_░l┴╦╠ōöMš²ŅM═Ō┐Ų╩ųąg─ŻöM┼Óė¢ŽĄĮyŻ¼▓┘ū„š▀┐╔▓┘ū„╠ōöMĄ─╩ųągŲ„ąĄī”╠ōöMĄ─╗╝š▀▀Mąą╩ųągŻ©łD9Ż®Ż¼įōŽĄĮyĄ─╠ž³c╩Ū┐╔ęį×ķCT╚²ŠSųžĮ©▄øĮM┐Ś─Żą═╠Ē╝ėŲš═©Č■ŠSöĄ┤aššŲ¼╝y└ĒŻ¼Å─Č°Ą├ĄĮŠ▀ėąĖ▀Č╚šµīŹĖąĄ─’BŅM├µ─Żą═Ż¼▓óī”▄øĮM┐Śūāą╬▀MąąŅA£yĪŻ2005─Ļ├└ć°╦╣╠╣ĖŻ┤¾īWķ_░l┴╦╗∙ė┌╠ōöM¼FīŹĄ─┤Įļ±┴č╩ųąg┼Óė¢ŽĄĮyŻ¼▀@ę╗ŽĄĮy┐╔ęįīŹ¼FīŹĢrĄ─▄øĮM┐Śūāą╬ėŗ╦Ń┼c┴”Ę┤ü╣”─▄ĪŻ
łD9 VRSSOS╠ōöMš²ŅM═Ō┐Ų╩ųąg─ŻöM┼Óė¢ŽĄĮy
Č■Īó╣▓ąįĻPµI╝╝ągĘų╬÷
Ż©ę╗Ż®ÖCśŗŠC║Ž┼cČÓąį─▄ųĖś╦ā×╗»
įOėŗÖCŲ„╚╦ÖCśŗ╩ūŽ╚▒žĒÜØMūŃ▌^Ė▀Ą─░▓╚½ąįę¬Ū¾Ż¼Ųõ┤╬į┌ĘĮ▒Ńągš▀▓┘ū„Ą─╗∙ĄA╔ŽØMūŃ╠žČ©═Ō┐Ų╩ųąg▀^│╠ųąĄ─╣”─▄ąĶŪ¾ĪŻÅ─ą┬ą═ÖCŲ„╚╦Ą─═žōõĮYśŗĪóą┬ą═▀\äėĖ▒Īóą┬ą═ÖCśŗų¦µ£Ą╚ĘĮ├µĄ─蹊┐╚ļ╩ųŻ¼įOėŗ│÷Š▀ėą╚▀ėÓūįė╔Č╚Ą─ÖCŲ„╚╦ÖCśŗĪŻ═¼Ģrę¬▀MąąÖCŲ„╚╦ČÓąį─▄ųĖś╦ā×╗»įOėŗŻ¼īŹ¼FÖCŲ„╚╦ņ`╗ŅęÄäØĪóŠ½┤_Č©╬╗Ą──┐ś╦Ż¼╠ßĖ▀ÖCŲ„╚╦Ą─äéČ╚║═ņ`╗ŅąįĪŻ
Ż©Č■Ż®╣żū„┐šķgĘų╬÷┼c┬ĘÅĮęÄäØ
ßśī”╠žČ©═Ō┐Ų╩ųągĄ─ßt»¤ąĶŪ¾Ż¼ī”ÖCŲ„╚╦▀Mąą╣żū„┐šķg║═┬ĘÅĮęÄäØĘų╬÷Ż┐═©▀^Į©┴óÖCąĄ▒█Ą─▀\äėīWĘĮ│╠ĪóįOėŗ▄ē█EęÄäØ╦ŃĘ©īŹ¼FÖCŲ„╚╦ŲĮĘĆĪó¤oš±╩Ä▀\ąąŻ¼▒▄├Ōė╔ė┌─®Č╦╦┘Č╚╗“╝ė╦┘Č╚▀^┤¾Ä¦üĒĄ─š±äė’LļUĪŻ┴Ē═ŌŻ¼ÖCŲ„╚╦┬ĘÅĮęÄäØĢrąĶ│õĘų┐╝æ]╩ųąg┐šķg▒▄┼÷Ż¼į┌ņ`╗Ņ╣żū„┐šķgā╚īŹ¼FĖ▀ą¦┬╩Ą─¤o┼÷ū▓▀\äėŻ¼╠ßĖ▀╩ųągą¦┬╩▒▄├ŌĖ╔╔µ┐╔─▄įņ│╔Ą─╩ųąg’LļUĪŻ
Ż©╚²Ż®ßtīWłDŽ±╠Ä└Ē┼cÖCŲ„╚╦ī¦║Į
═Ō┐Ų╩ųągųąąĶŠC║Ž└¹ė├CTĪóMRĪóB│¼Ą╚ČÓĘN│╔Ž±ĘĮĘ©×ķągš▀╠ß╣®▓╗═¼ĘĮ├µĄ─ĮŌŲ╩ĮYśŗ║═╣”─▄ė░Ž±ą┼ŽóĪŻßtĤąĶ└¹ė├ßtīWłDŽ±┼õ£╩┼c╚┌║Ž╝╝ągŻ¼░čĮŌŲ╩łDŽ±║═╣”─▄łDŽ±ėąÖCĮY║ŽŻ¼╩╣╚╦¾wā╚▓┐Ą─ĮYśŗĪó╣”─▄ą┼ŽóĪó╚²ŠS▒Ē├µÆ▀├Ķ─Żą═Ą╚ČÓį¬öĄō■Ę┤ė│į┌═¼ę╗Ę∙łDŽ±ųąŻ¼Å─Č°Ė³╝ė£╩┤_ų▒ė^Ąž×ķągš▀╠ß╣®╚╦¾wĮŌŲ╩Īó╔·└ĒĪó▓Ī└ĒĄ╚ą┼ŽóŻ¼×ķ╩ųągĄ─ęÄäØ╠ß╣®╚½├µĪóŠ½┤_Īó┴┐╗»Ą─╚╦¾wą┼Žó─Żą═ĪŻłDŽ±╠Ä└ĒūėŽĄĮyīóś╦Č©ĮY╣¹īŹĢr’@╩Šį┌ėŗ╦ŃÖCŲ┴─╗╔ŽŻ¼▓óīóś╦Č©ģóöĄé„▀fĮoÖCŲ„╚╦Ż¼ÖCŲ„╚╦ūįäėĖ∙ō■═Ō┐Ų╩ųąg▓┘ū„Ą─īŹļHŪķør║═īŹĢrś╦Č©ģóöĄŠ½┤_Ąž═Ļ│╔Č©╬╗Ż¼═¼ĢrīŹĢr’@╩ŠÖCŲ„╚╦─®Č╦į┌ągŪ░╚²ŠSŅ^▓┐─Żą═ł÷Š░ųąĄ─╬╗ų├╝░įö╝Ü╬╗ū╦ą┼ŽóŻ¼╩╣ągš▀╚½├µšŲ╬šÖCŲ„╚╦─®Č╦╦∙╠Ä╬╗ų├Ą─įö╝ÜĮŌŲ╩ĮYśŗą┼ŽóŻ¼Å─Č°īŹ¼FÖCŲ„╚╦╩ųągĄ─ī¦║ĮČ©╬╗ĪŻ
Ż©╦─Ż®╠ōöM╩ųągŽĄĮy蹊┐
į┌═Ō┐Ų╩ųągŪ░Ż¼Į©┴óŠ½┤_Ą─ĮM┐Ś─Żą═Ż¼ė├Ė▀Č╚šµīŹĖąĄ─ĘĮ╩ĮĘĆČ©Īó▒ŲšµĪóīŹĢrĄž─ŻöM╩ųąg▀^│╠Ż¼▓óīóŲõųąę╗ą®╚Ōč█▓╗ęūģ^ĘųĄ─▒žę¬╠žš„’@ų°¾w¼F│÷üĒŻ¼═¼Ģr─ŻöMĮM┐ŚŲ„╣┘į┌╩ųągŲ„ąĄĄ─═Ō┴”Į╗╗źū„ė├Ž┬ūāą╬Ą─▀^│╠Ż¼╠ß╣®▒ŲšµĄ─╩ųąg¼Fł÷ĖąėXĪŻæ¬ė├╠ōöM╩ųągŽĄĮyŻ¼ągš▀─▄ē“į┌╠ōöMĄ─ęĢėX┼c▓┘ū„ŁhŠ│ųą▀Mąą▓┘ū„╚╬䚥─ŅAŽ╚č▌ŠÜŻ¼Öz“׎ĄĮy╩Ūʱ═Ļ╔ŲĪŻ═¼Ģr┐╔ęį└¹ė├╠ōöM╩ųągŽĄĮy▀Mąą╩ųąg╝╝ąg┼Óė¢Ż¼ęį╩╣ągš▀╩ņŠÜšŲ╬š╩ųągÖCŲ„╚╦ŽĄĮyĄ─▓┘ū„╝╝Ū╔ĪŻ
Ż©╬ÕŻ®ßt»¤ÖCŲ„╚╦Ą─╚╦ÖCĮ╗╗ź╝╝ąg
ī”ÖCŲ„╚╦Ą─▓┘ū„ė╔ė┌╚▒Ę”ėąą¦Ą─┴”Ę┤üĖąų¬Ų„╝■Ż¼─┐Ū░ų„ę¬╝»ųąį┌╠ōöM┴”Ę┤üĄ─蹊┐Ż¼▓╔ė├Š▀ėą╔·╬’ŽÓ╚▌ąįĄ─╬óąĪą═┴”Ę┤üŲ„╝■īŹ¼FßtĤ▓┘ū„Ą─šµīŹ┴”Ėąų¬Ż¼╩Ūßt»¤ÖCŲ„╚╦▓┘┐ž╦∙╣▓═¼├µ┼RĄ─ĻPµI╝╝ągŻ¼Į©┴ó╗∙ė┌šµīŹ╚²ŠS┴ó¾węĢėXĘ┤ü║═┴”ėXĘ┤üĄ─Š▀ėąĖ▀▒ŻšµČ╚║═ĘĆČ©ąįĄ─ßtĤ▀b┐ž▓┘ū„┼_╩Ū╚╦ÖCĮ╗╗źĄ─ųž³cč▌╝╝ā╚╚▌ĪŻ┤╦═ŌŻ¼═Ō┐Ų╩ųąg▌oų·ÖCŲ„╚╦Ą─╚╦ÖCĮ╗╗źŽĄĮyŻ¼╚ń║╬ūīļp╩ų├”┬ĄĪóŠ½╔±╝»ųąĄ─ągš▀ĘĮ▒ŃČ°ėųėąą¦Ąž▓┘┐žÖCŲ„╚╦╩ŪĮ╗╗ź╝╝ągĄ─ļy³cŻ¼╚ń║╬įOėŗ╗∙ė┌ęĢėXĪóČÓĘN▓┘ū„Į╗╗źĘĮ╩ĮĄ─ßtĤ┼cÖCŲ„╚╦ģf═¼╩ųągŽĄĮy╩Ū╝╝ągĄ─║╦ą─ĪŻ
Ż©┴∙Ż®ÖCŲ„╚╦░▓╚½▒O┐ž┼c┐žųŲ
ÖCŲ„╚╦▌oų·═Ō┐Ų╩ųągĄ─Ū░╠ß╩Ū▒žĒÜ▒ŻūC╚╦┼cÖCŲ„╚╦Ą─Į^ī”░▓╚½Ż¼╦∙ęį▒žĒÜ蹊┐ÖCŲ„╚╦ŽĄĮy░▓╚½ąįÖCśŗĪóČÓīėūįų„░▓╚½▒O┐žĪó┼÷ū▓Öz£yĄ╚░▓╚½ąįįOėŗĄ╚╣▓ąįĻPµI╝╝ągŻ¼Į©┴óÖCŲ„╚╦░▓╚½ąįįOėŗĄ─╝╝ąg¾wŽĄ┼cś╦£╩ĪŻ═¼ĢrąĶųŲČ©ÖCŲ„╚╦░▓╚½ąį£╩ätĪó£yįćŠSūoś╦£╩╗»┴„│╠ĪóÖCŲ„╚╦╬ŻļUĄ╚╝ēĶbČ©ś╦£╩║═░▓╚½įu╣└¾wŽĄŻ¼×ķÖCŲ„╚╦▌oų·═Ō┐Ų╩ųągĄ─æ¬ė├═ŲÅVū÷║├£╩éõĪŻ
╚²Īóå¢Ņ}╝░š╣═¹
į┌═Ō┐Ų╩ųągųąę²╚ļÖCŲ„╚╦ŽĄĮy┐╔ęį╩╣╩ųągĮ©┴óį┌Ė³Š½┤_ĪóĖ³ĘĆČ©║═│╠ą“╗»Īóś╦£╩╗»Ą─╗∙ĄA╔ŽŻ¼£p╔┘╚╦×ķę“╦ž║═Įø“×ę“╦žĄ─ė░ĒæŻ¼£p▌pßtĤä┌äėÅŖČ╚Ż¼īŹ¼FĮĄĄ═▓┘ū„ļyČ╚Īó╠ßĖ▀Č©╬╗Š½Č╚║═╩ųąg┘|┴┐Ż¼ęį┤╦▒ŻūCš¹éĆų╬»¤Ą─Š½┤_īŹ╩®ĪŻ
Ą½─┐Ū░Ą─ÖCŲ„╚╦▌oų·╩ųągę▓┤µį┌ę╗ą®å¢Ņ}ĪŻė╔ė┌▄øĮM┐Śęū░l╔·ą╬ūā▓óŪęßtĤĄ─▓┘ū„Ģ■Ė─ūāįŁėąĄ─Ų„╣┘ĮM┐Śą╬æBŻ¼╩╣ągŪ░╚²ŠSųžĮ©─Żą═┼cągųą╗╝š▀Ų„╣┘Ą─Ė▀Š½Č╚┼õ£╩▌^×ķ└¦ļyĪŻ┤╦═ŌŻ¼─┐Ū░Ą─ßt»¤ÖCŲ„╚╦▓┘ū„Ģr╚▒╩¦┴”ĖąŻ¼╔ą▓╗─▄Įoągš▀ĦüĒė|ėX╣”─▄╝░Ė▀Č╚Ą─╩ųągšµīŹĖąĪŻæ¬Į©┴óĖ▀Ę┬šµČ╚ĮM┐ŚŲ„╣┘╬’└Ē─Żą═ęį╝░╗∙ė┌ĮŌŲ╩īW╚╦¾wĮM┐Ś╠žš„Ą─┴”Ę┤ü╬’└Ē─Żą═Ż¼ęįīŹ¼FŠ½┤_Ą─┴”Ę┤üŻ¼┤¾┤¾╠ßĖ▀╩ųągĄ─¼FīŹĖąĪŻ
┤╦═Ō▀ĆąĶę¬ī”ÖCŲ„╚╦ČÓąį─▄ųĖś╦▀Mąąā×╗»įOėŗŻ¼ęį▒ŻūCÖCŲ„╚╦ØMūŃ╚╬äš╣żū„┐šķgę¬Ū¾Ą─═¼ĢrŻ¼Ė─╔Ų─┐Ū░ßt»¤ÖCŲ„╚╦Ą─äéČ╚║═ņ`╗Ņąįå¢Ņ}ĪŻ×ķ┤_▒Ż╗╝š▀╝░ßtūo╚╦åTĄ─░▓╚½Ż¼ßt»¤ÖCŲ„╚╦æ¬įōĮ©┴óĖ³╝ė═Ļ╔ŲĄ─░▓╚½▒O┐žŽĄĮyŻ¼ī”┐╔─▄░l╔·Ą─«É│ŻŪķørŻ¼─▄ē“ūįų„╗“░ļūįų„Ąžåóäė░▓╚½Ę└ĘČŽĄĮyĪŻ
ßśī”═Ō┐Ų╩ųągĄ─ßt»¤ąĶŪ¾Ż¼┴óūŃė┌ć°ā╚═Ō═Ō┐Ų╩ųągÖCŲ„╚╦蹊┐Ą─╗∙ĄA║═¼FĀŅŻ¼ęįÖCŲ„╚╦╝╝ągĪóėŗ╦ŃÖC╝╝ąg║═┐žųŲ└Ēšō×ķų¦ō╬Ż¼└¹ė├│╔╩ņĄ─ßt»¤ÖCŲ„╚╦╣▓ąį╝╝ągŻ¼═╗ŲŲŽĄĮyīŻķT╝╝ągŻ¼čąųŲ│÷Ė³ČÓĮøØ·īŹė├Ą─ųŪ─▄╗»═Ō┐Ų╩ųągÖCŲ„╚╦▓óæ¬ė├ė┌┼R┤▓Ż¼┐╔▀Mę╗▓Į╠ßĖ▀┐┌Ū╗ßtīWŅIė“öĄūų╗»╦«ŲĮĪó╝ė╦┘ą┬ą═ßt»¤╝╝ągĄ─Ųš╝░═ŲÅVĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║ÖCŲ„╚╦╝╝ągį┌═Ō┐Ų▌oų·╩ųągųąĄ─蹊┐┼cæ¬ė├
▒Š╬─ŠWųĘŻ║http://www.lukmueng.com/html/solutions/14019310601.html